Download
1 / 27
270 likes | 286 Views
Parallel Integration of Video Modules. T. Poggio, E.B. Gamble, J.J. Little 6.899 Paper Presentation Presenter: Brian Whitman. Overview. Different cues make up a ‘reliable map’ Edge Stereo Color Motion How can we integrate these cues to find surface discontinuities?. Architecture.

E N D
Parallel Integration of Video Modules T. Poggio, E.B. Gamble, J.J. Little 6.899 Paper Presentation Presenter: Brian Whitman
Overview • Different cues make up a ‘reliable map’ • Edge • Stereo • Color • Motion • How can we integrate these cues to find surface discontinuities?
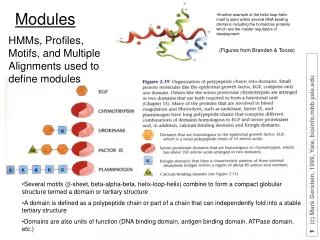
Physical Discontinuities • Depth • Orientation • Albedo Edges • Specular Edges • Shadow Edges
Implementation • The architecture was not fully implemented • Results in integrating brightness with: • Hue • Texture • Motion • Stereo • But separately – not together
Smoothness • Physical processes behind cues change slowly over time: • Two points adjacent are not vastly different depths • Need a representation to capture this
Discontinuities • Cues are assumed smooth everywhere except on discontinuities • Each module needs to • assume and interpolate smoothness • detect edges and changes
Dual Lattices • Circles are smooth, crosses are lines / discontinuities
Quickly, MRF (again) • Prior probability of depth in the lattice is: • Z: normalization, T is temperature, U is energy (sum of local contributions) • If we know g (observation) use it
Membrane Prior • Prior energy when surface is smooth:
Gaussian Process • If we assume gaussian process generated the noise:
Line Process • Where is the smoothness assumption broken? • l: line between i and j? • Vc: varying energies for different line configurations
Integrated Process • Extend the energy function to tie together vision modules to brightness gradients • Assumption: changes in brightness guide our belief of the source of surface discontinuities
High Brightness Gradients • Instead of energy terms based on line configuration, use strengths of brightness edges
Low-level Modules • Paper mentions: • Edge detection • Stereo • Motion • Color • Texture • But only has short detail on texture & color.
Texture Module • Measures level density • ‘Blobs’ are taken through a center-surround filter
Color Module • Hue = R/(R+G) • Should be independent of illumination • MRF uses this to segment image into sections of ‘constant reflectance’
Parallelizing • Many words about specialized architecture • Small processes better for mass computation • Specialized experts model
More Recent • Recent Mohan, Papageorgiou, Poggio paper: • “Example-Based Object Detection in Images by Components” • Train an ‘ACC’ using different ‘experts’
Conclusions • All extracted surface discontinuities can be used in later understanding • “Do brightness edges aid human computation of surface discontinuities?” • Parallelizing image analysis…