Download
1 / 10
100 likes | 193 Views
Realtime 3D model construction with Microsoft Kinect and an NVIDIA Kepler laptop GPU. Paul Caheny MSc in HPC 2011/2012 Project Preparation Presentation. Today's Presentation. Project motivation. Introduction to Microsoft Kinect and depth maps.

E N D
Realtime 3D model construction with Microsoft Kinect and an NVIDIA Kepler laptop GPU Paul Caheny MSc in HPC 2011/2012 Project Preparation Presentation.
Today's Presentation • Project motivation. • Introduction to Microsoft Kinect and depth maps. • A taster on algorithms for constructing 3D models from depth maps. • Particular goals and constraints for this dissertation. Paul Caheny 2012
Project Motivation Proposal from Holoxica Ltd. • Most holograms produced from 3D models which are computer generated ab initio. • Some customers already posses high quality 3D models of real world objects. • Commercial scanning solutions prohibitively expensive for Holoxica's purposes. • A cheaper, good quality, portable 3D scanning & model construction system could make holograms a more viable and attractive proposition for customers. Paul Caheny 2012
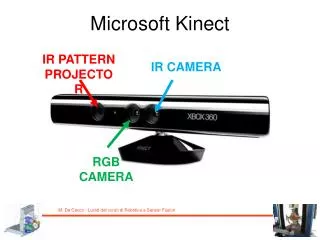
Microsoft Kinect & Depth Maps • Depth maps have been the subject of much research for 3D model construction over the past 20 years. • The Kinect provides unprecedented quality to cost ratio as a depth sensor. • Video Camera, IR Projector, IR Camera • IR Projector/Camera constitute a depth sensor providing a 640 x 480 depth map at 30Hz frame rate. Paul Caheny 2012
3D Modelling from Depth Maps Put simply – fusing multiple viewpoints of the scene or object into a single unified 3D model. • Early approaches involved highly calibrated motion of the object plus simple surface construction techniques (e.g. directly meshing the depth data points). • Current state of the art replaces calibrated motion with software tracking & high quality 3D model construction techniques. • Two techniques: Iterative Closest Point (ICP) algorithm for object tracking and Volumetric Integration for high quality model generation. Paul Caheny 2012
Iterative Closest Point (ICP) A method for the alignment of 3D surfaces. • Introduced independently by Besl & McKay at GM and Chen & Medioni at Uni. Southern California in early '90s. • If corresponding points on surface in two views are known, trivial to compute exact transform which aligns surfaces. But we don't know corresponding points on surfaces in distinct depth maps. • Make a heuristic guess of corresponding points, compute transform with selected points, achieving closer alignment. Reselect points heuristically on transformed surfaces, iterate until close enough. Paul Caheny 2012
Volumetric Integration A technique for fusing data from multiple aligned depth maps. • ICP alignment & depth sensors have inherent margin of error / measurement uncertainty. Results in noisy data points following ICP alignment. • Reduce noise & improve result by combining multiple views using heuristics which minimises noise. • Curless & Levoy, Stanford '96 Paul Caheny 2012
What's New? ICP and Volumetric Integration introduced in the '90s. • Both techniques have have been subject of much refinement since. • In the 90s workflow looked like: Scan -> ICP Batch process -> Volumetric Integration Batch process -> Finished 3D Model. • Mid 2000s saw systems with realtime ICP phase plus batch Volumetric Integration phase to create finished model. • 2011 saw publication of research by Augmented Reality Group at Microsoft Research Cambridge demonstrating a realtime, synchronous ICP and Volumetric Integration system called KinectFusion running at Kinect full frame rate of 30Hz. Paul Caheny 2012
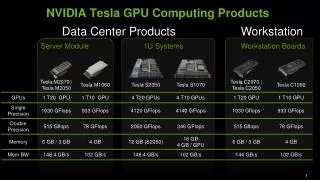
My Dissertation Focus on small object scanning and Laptop GPU. • Implement the algorithms from scratch using CUDA. • Plan to use NVIDIA's next generation Kepler architecture, recently launched for consumer desktop & laptop market. • Laptop GPU TDP ~35W versus Tesla 2090 TDP of 225W – Fewer Cores, Less Memory, Less Bandwidth, Lower Clock Speed. Paul Caheny 2012
Wrap Up References: • R. Newcombe et al. KinectFusion: Real-time dense surface mapping and tracking. In Proc. 10th IEEE Int. Symp. on Mixed and Augmented Reality, 2011. • B. Curless and M. Levoy. A volumetric method for building complex models from range images. ACM Trans. on Graphics, 1996. • P. Besl and N. McKay. A method for registration of 3D shapes. IEEE Trans. on Pattern Analysis & Machine Intelligence, 14:239–256, 1992. • Y. Chen and G. Medioni. Object modeling by registration of multiple range images. Image and Vision Computing (IVC), 10(3):145–155, 1992. Paul Caheny 2012