Download
1 / 10
100 likes | 258 Views
Concept of ‘hexapod type’ DB Quad adjustable support. Mateusz Sosin. Alignment requirements. Alignment requirements. Mechanical requirements All regulation components have to be fitted into accesible space Amount of „friction” components reduced to minimum

E N D
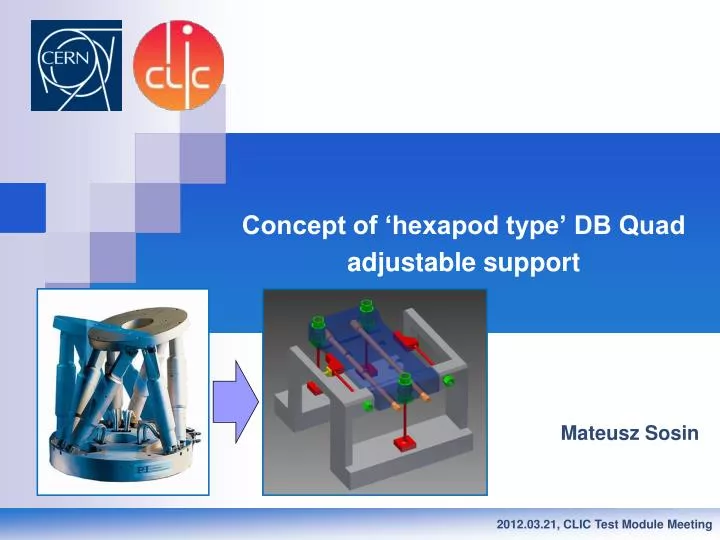
Concept of ‘hexapod type’ DB Quad adjustable support Mateusz Sosin
Alignment requirements • Mechanical requirements • All regulation components have to be fitted into accesible space • Amount of „friction” components reduced to minimum • Locknig after adjustment shall not modify the adjustment performed (self-locking solution preffered) • Alignment support need isotropic stiffness with value according to requirements (?) What stiffness is required? Min. eigenfrequency of DBQ support? • As small amount of components as possible • Machining price as low as possible • Ergonomy of alignment (according to low access space)!!! • Easy acces to all regulation components • Easy acces to all blocking components (if not self-blocked) • Predictable kinematics of support during regulation
Idea of modified ‚hexapod type’ mechanism • According to reduced space for alignment support • Standard hexapod solution was changed to configuration with 3 support in vertical and 3 support in horizontal (that solution make kinematics much simple for manual regulation purposes) • Due to 5DOF regulations needed – one support has non adjustable length and is rigid longitudinally (according to Z – slide 2), rest of supports has adjustable lengths (lj)
Reverse kinematics of regulation for DBQ supporting platform • Iterational regulation in closed-loop-control: • Supports A,B,C ~parallel to CS[0].y0, supports D,E (red) ~parallel to CS[0].x0 • We are looking reg.error only for adequate vector components (here y): • We perform regulation with found values • At required regulation ranges - method shall be convergent up to 4 iterations • Platform - reverse kinematics: • length (scalar): • r - needed translation, R – rotation matrix for support according to CS[0], lj-wectors of each support, sj – support coordinate in CS[1], dj – support coordinate in CS[0]
Mechanical approach to realization of DBQ adjustable support • Adjustable support components • Frame (girder interface) • Supp. plate – DBQ interface • Joints (stiff in supporting direction, flexible transversally to supporting direction), threaded at end to perform regulation • Regulation screws • Example of worm gear motion transmission • Using worm gear for driving regulation screws make support self-locking. Also ergonomy of access to regulation components increase. Resolution of regulation step is multiplied by gear ratio. Longitudal blocade Schema shows only operating principle – don’t be sugested by used dimensions and schapes!!!
Mechanical approach to realization of DBQ adjustable support – stiffness and shape of supports • Joint characteristics: • Support stiff longitudinally • Prefered joint lenght: as short as possible • Material has to work in spring part of characteristics • Possible material 34CrNiMo6 -> Rm up to 1200MPa • Tasks to do: • Perform simulations to find best shape of flexible support with longitudinal stiffness as big as possible and transversal stiffness as low as possible capable to take requested deformation within spring deformation characteristics part of material
Mechanical approach to realization of DBQ adjustable support – regulation screws • Manual regulations – differential thread mechanism • Using pair of different pitches and rotations threads gives us differential relativepith which can drastically increase resolution of regulations • Additional blocking clamp needed • Eg.below – diff.pitch – 0,5mm->res=~1,5µm • Worm gear + transmission shaft • Using worm gears & transmission shafts for driving positioning screws we can increase resolution (nuts have to be fastened in bearings, ball screw prefered) • Worm gear mechanism can be self locking • Ergonomy of using adjustable support increase – all regulation components accesible at one side of DBQ • Easy to integrate motorization of support Nice idea of N.Chritin!
Summary • After first analysis of ‚hexapod type’ DB Quad support design looks feasible to realize • Amount of regulation components and „friction” connections are reduced to minimum • In configuration with worm gear – structure is self locking and easy to integrate with external motorization components • Ergonomy of use and resolution meet the requirements