Download
1 / 22
260 likes | 687 Views
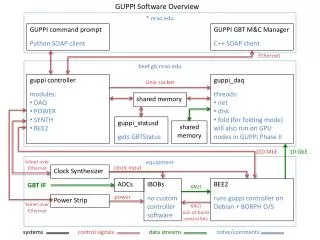
Synthèse TP 25. Modélisation cinématique des mécanismes. Schéma cinématique. Transformation de mouvement :. SORTIE. ENTREE. Rotation discontinue Rotation alternative Translation alternative. Rotation Continue. Chaîne d’energie. TRANSMETTRE. Nature du mouvement : modifiée

E N D
Synthèse TP 25 Modélisation cinématique des mécanismes. Schéma cinématique
Transformation de mouvement : SORTIE ENTREE Rotation discontinue Rotation alternative Translation alternative Rotation Continue
Chaîne d’energie TRANSMETTRE Nature du mouvement : modifiée Vitesse : modifiée Transformation de mouvement Nature du mouvement : identique Vitesse : modifiée Adaptation de vitesse Nature du mouvement : identique Vitesse : identique Transmission homocinétique
PIVOT PIVOT GLISSANT GLISSIERE HELICOIDALE S1 S1 S1 S1 S1 S1 = = = S2 S2 S2 S2 S2 S2 Les symboles interchangeables Pour ces liaisons, le contenant et le contenu sont interchangeables. Liaisons axisymétriques Le symbole de ces liaisons doit respecter l’axe de la liaison : point + direction. Position du symbole : quelconque sur l’axe.
GLISSIERE APPUI PLAN S1 S1 S1 S1 = = S2 S2 S2 S2 Les symboles interchangeables Pour ces liaisons, le contenant et le contenu sont interchangeables. Glissière & Appui plan Le symbole de ces liaisons doit respecter la direction de la liaison. Position du symbole : quelconque dans l’espace.
ROTULE S1 S1 = S2 S2 Les symboles interchangeables Pour cette liaison, le contenant et le contenu sont interchangeables. Rotule Orientation du symbole : quelconque dans l’espace. Position du symbole : centre des formes sphériques.
APPUI PONCTUEL LINEAIRE RECTILIGNE LINEAIRE ANNULAIRE Position de la liaison : Centre de la sphère S1 S1 Position de la liaison : Ligne de contact du prisme S1 Position de la liaison : Centre de la sphère Orientation de la liaison : Axe du cylindre Orientation de la liaison : Normale au plan Orientation de la liaison : Normale au plan S2 S2 S2 Les symboles NON interchangeables Pour ces liaisons, les deux solides ne sont pas interchangeables.
Appui ponctuel de normale (A,x) Appui ponctuel de normale (A,u) y y a a y1 y1 A A S2 S2 + + S1 S1 ≠ u x x O O S0 S0 l l x1 x1 Exemple : système à excentrique
S1 Appui ponctuel S2 Les symboles spécifiques Roue et vis sans fin
S1 Appui ponctuel S2 Les symboles spécifiques Les roues dentées
S1 Pivot à roue libre S2 Les symboles spécifiques Pivot à roue libre
S1 Pivot à roue libre S2 Les symboles spécifiques Pivot à roue libre
Les autres symboles spécifiques Cf. tableau p 576 (GDSTI)
Les autres symboles spécifiques Cf. tableau p 576 (GDSTI)
Les autres symboles spécifiques Cf. tableau p 576 (GDSTI)
S1 O x Pivot (O,x) S2 Pivot (O,x) S2 S3 S3 S1 Les guidages en rotation imbriqués
+x S2 S1 -x Principe de bilatéralité Appui ponctuel Pas de rupture du contact quelque soit le sens de déplacement des solides Linéaire rectiligne Linéaire annulaire Exemple de l’appui ponctuel : • 2 points de contact possibles • … mais il y a un jeu entre • S2 et S1 : • Ø pion < Ø trou oblong • En pratique : • - Un seul point de contact • - Un point de contact par sens de fonctionnement Quelque soit le sens de la translation de S1 suivant l’axe x (+x ou –x), ce mouvement entraînera le déplacement du point A.
« Maneton » Cylindre excentré petit Ø e2 e1 e2 e1 « Excentrique » Cylindre excentré grand Ø Représentation des manivelles
Exemple : Le Winch Pignon Tambour Corps Roue Axe Manivelle Les solides cinématiques
Exemple : Le Winch Ponctuel (J,z) Pignon Tambour Pivot (A,y) Ponctuel (I,z) Roue libre Corps Appui plan (y) Pivot (O,y) y Roue Axe Manivelle x Pivot glissant (O,y) à roue libre O I A J Graphe des liaisons
Exemple : Le Winch Détail des roues libres Ponctuel (J,z) Pignon Tambour Pivot (A,y) Pivot (O,y) Ponctuel (I,z) Roue libre Corps Appui plan (y) Pivot (O,y) Roue Axe Manivelle Pivot glissant (O,y) à roue libre
Exemple : Le Winch Schéma cinématique