Download
1 / 58
580 likes | 637 Views
Delve into the development and benefits of artificial gravity habitats, addressing the adverse effects of microgravity on astronauts' health. Learn historical concepts, comfort charts, and innovative solutions for space architecture and well-being.

E N D
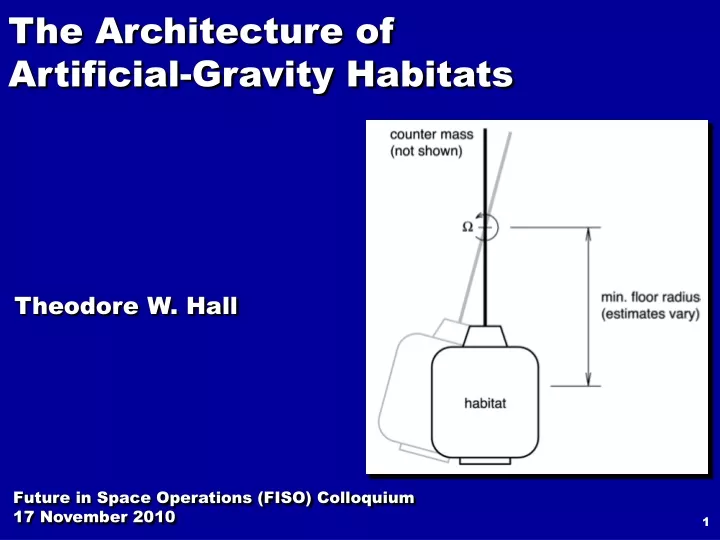
The Architecture ofArtificial-Gravity Habitats Theodore W. Hall Future in Space Operations (FISO) Colloquium17 November 2010 1
The Architecture ofArtificial-Gravity Habitats Theodore W. Hall Future in Space Operations (FISO) Colloquium17 November 2010 2
Education: Architecture B.S. ’79, M.Arch. ’81, Arch.D. ’94: University of Michigan Experience: Software Development ’80-’94: Systems Research ProgrammerArchitecture and Planning Research LaboratoryUniversity of Michigan ’94-’04: Postdoctoral Fellow & Research OfficerDepartment of ArchitectureChinese University of Hong Kong ’09- Research Computer SpecialistUniversity of Michigan 3D Lab (UM3D) “Expensive Hobby”: Space Architecture • Dissertation: “The Architecture of Artificial-Gravity Environmentsfor Long-Duration Space Habitation” • http://www.artificial-gravity.com/ • http://www.spacearchitect.org/ My Background. 3
Adverse Effects of Micro Gravity: • Fluid redistribution • Fluid loss • Electrolyte imbalances • Cardiovascular changes • Red blood cell loss • Muscle damage • Bone damage • Hypecalcemia Why Artificial Gravity? 4
Adverse Effects of Micro Gravity: • Immune suppression • Cell membrane thickening • Vertigo and disorientation • Nausea and malaise • Exercise incapacity • Olfactory suppression • Weight loss • Flatulence Why Artificial Gravity? 5
Adverse Effects of Micro Gravity: • Facial distortion • Postural changes • Coordination changes Why Artificial Gravity? 6
Tsiolkovsky, 1903 Noordung, 1928 von Braun, 1952 Lockheed Corp., 1960 Historical Concepts. 8
NASA LaRC & North American, 1962 Inflatable concept, 1962 Historical Concepts. 9
Fundamental weaknesses: • Too abstract. • Too precise. • Too difficult to read. Comfort charts. 15
min. radius and velocitymin. mass and energy Artificial gravity at the limits of “comfort”. 27
R = 67.1 mV = 14.0 m/sv = 1.0 m/sx = 3.8 mslope = 4º = 7% grade = 1:15 Apparent slope at min. agreed “comfort” R & V. 37
R = 67.1 mV = 14.0 m/sv = –0.5 m/sx = 0.0 mlean = 4º Apparent slope at min. agreed “comfort” R & V. 38
“BNTR Artificial Gravity Mars Mission.”[Borowski, Dudzinski, Sauls, Minsaas, 2006] Greater apparent slope at smaller R & V. 39
Acent = 0.38 gW = 4.0 rpmR = 21.2 mV = 8.9 m/s “BNTR Artificial Gravity Mars Mission.”[Borowski, Dudzinski, Sauls, Minsaas, 2006] Greater apparent slope at smaller R & V. 40
“BNTR Artificial Gravity Mars Mission.”[Borowski, Dudzinski, Sauls, Minsaas, 2006] Greater apparent slope at smaller R & V. 41
floor slope = 13ºladder lean = 6º “BNTR Artificial Gravity Mars Mission.”[Borowski, Dudzinski, Sauls, Minsaas, 2006] Greater apparent slope at smaller R & V. 42
“2001: A Space Odyssey.”[Kubrick, Clarke, 1968] Ladder in side wall – not recommended. 43
“2001: A Space Odyssey.”[Kubrick, Clarke, 1968] Ladder in side wall – apparent lean. 44
“VGRS.”[Emmart, 1989] Ladder in side wall – not recommended. 45
Axial Most comfortable: • No Coriolis. • No apparent slope. • No floor curvature. • No ladders. • No gravity gradient. Least stable? • Twists to tangential. Module Orientation. 46
Tangential Medium comfortable: • Coriolis. • Apparent slope. • Floor curvature. • No ladders. • No gravity gradient. Medium stable: • Needs balance. Module Orientation. 47
Radial Least comfortable: • Coriolis. • Ladders. • Gravity gradients. • Disoriented plan. Most stable. Module Orientation. 48