Download
1 / 1
10 likes | 109 Views
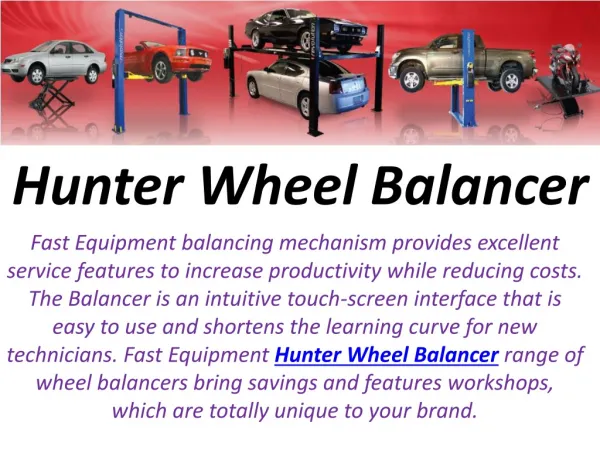
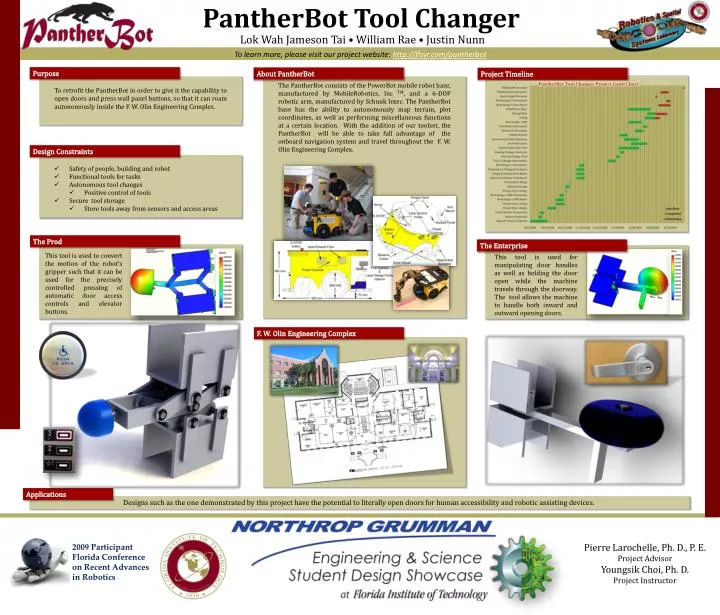
PantherBot Tool Changer. Lok Wah Jameson Tai • William Rae • Justin Nunn. To learn more, please visit our project website: http://flsvr.com/pantherbot. Purpose. About PantherBot. Project Timeline.

E N D
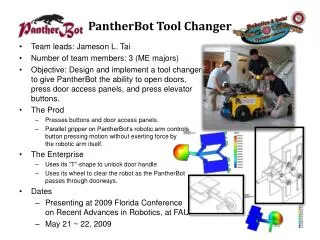
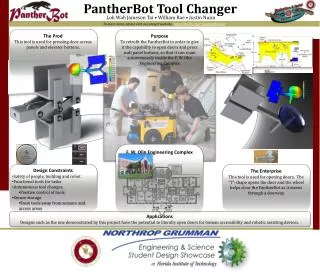
PantherBot Tool Changer Lok Wah Jameson Tai • William Rae • Justin Nunn To learn more, please visit our project website: http://flsvr.com/pantherbot Purpose About PantherBot Project Timeline The PantherBot consists of the PowerBot mobile robot base, manufactured by MobileRobotics, Inc TM, and a 6-DOF robotic arm, manufactured by Schunk Intec. The PantherBot base has the ability to autonomously map terrain, plot coordinates, as well as performing miscellaneous functions at a certain location. With the addition of our toolset, the PantherBot will be able to take full advantage of the onboard navigation system and travel throughout the F. W. Olin Engineering Complex. To retrofit the PantherBot in order to give it the capability to open doors and press wall panel buttons, so that it can roam autonomously inside the F. W. Olin Engineering Complex. Design Constraints • Safety of people, building and robot • Functional tools for tasks • Autonomous tool changes • Positive control of tools • Secure tool storage • Store tools away from sensors and access areas The Prod This tool is used for manipulating door handles as well as holding the door open while the machine travels through the doorway. The tool allows the machine to handle both inward and outward opening doors. The Enterprise This tool is used to convert the motion of the robot’s gripper such that it can be used for the precisely controlled pressing of automatic door access controls and elevator buttons. F. W. Olin Engineering Complex Applications Designs such as the one demonstrated by this project have the potential to literally open doors for human accessibility and robotic assisting devices. Pierre Larochelle, Ph. D., P. E. Project Advisor Youngsik Choi, Ph. D. Project Instructor 2009 ParticipantFlorida Conferenceon Recent Advances in Robotics