Download
1 / 11
120 likes | 145 Views
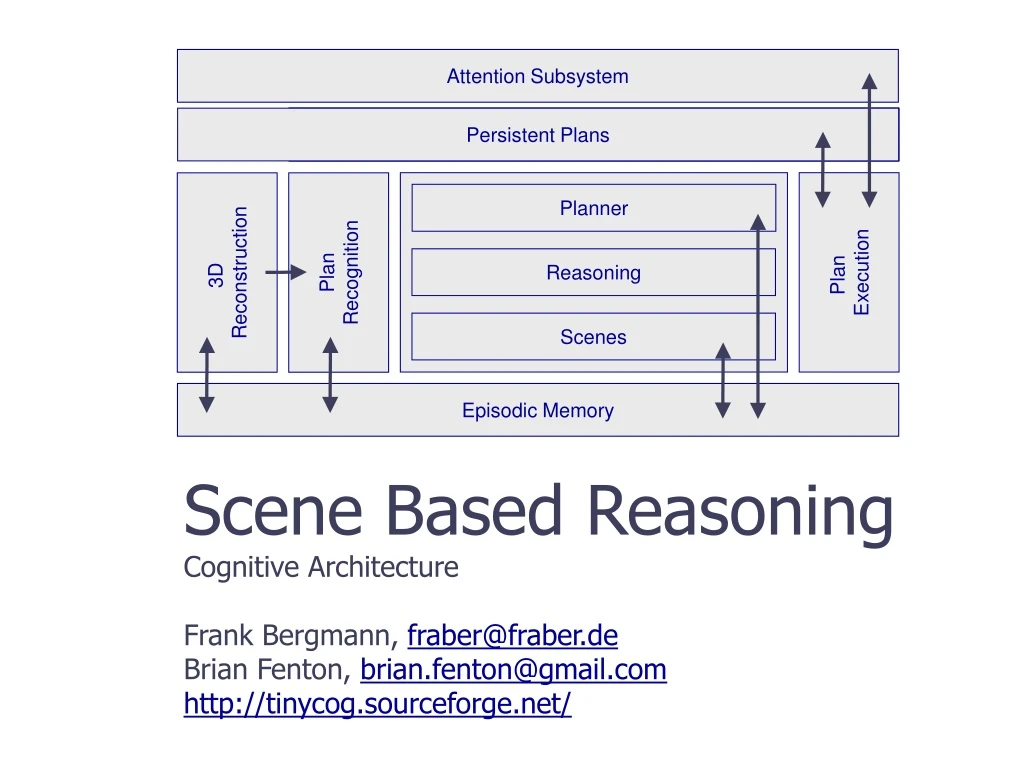
Attention Subsystem. Persistent Plans. Persistent Plans. Persistent Plans. Planner. Plan Execution. 3D Reconstruction. Plan Recognition. Reasoning. Scenes. Episodic Memory.

E N D
Attention Subsystem Persistent Plans Persistent Plans Persistent Plans Planner Plan Execution 3D Reconstruction PlanRecognition Reasoning Scenes Episodic Memory Scene Based ReasoningCognitive ArchitectureFrank Bergmann, fraber@fraber.deBrian Fenton, brian.fenton@gmail.comhttp://tinycog.sourceforge.net/
Attention Subsystem Persistent Plans Persistent Plans Persistent Plans Planner Plan Execution 3D Reconstruction PlanRecognition Reasoning Scenes Episodic Memory Problems Addressed & Approach Problems Addressed • We propose an integrated architecture for implementing a number of “self-models”. • We provide a model for talking about modalities (auxiliary verbs) without the use of higher-order or modal logics. Approach • Use Thomas Metzinger’s “Self-Model Theory of Subjectivity” as a kind of requirement statement. • Extend/generalize existing knowledge representation and reasoning formalisms to accommodate self-models. Implementation Status • Plays “Towers of Hanoi” • Working on a “Stone age prey/hunter” sandbox • http://tinycog.sourceforge.net/
Physical Planning Social Internal Different Levels of Self-Models • Physical Volume Self-Model “This is the room I’m in, this is my leg.“Identify the 3D volume of the robot representing SBR and model its capabilities • Capabilities Self-Model „I am good at this.“Performance statistics of task decompositions • Planning Self-Model „I usually hit the goal in 30% of all cases.“Performance statistics of plans performed • Intention Self-Model ”I currently try to do this.“Introspection into the goals currently pursued • Goal Self-Model “I would like to be to do this.“Introspection into active “Persistent Goals” • Social Self-Model “Other group members respect me.“Role of self in group activities. • Behavioral Self-Model “I usually react like this.“Episodic Memory recordings of past SBR actions • Emotional Self-Model “I am happy to hear the news.”Introspection into current emotions and historic model of emotions • Historical Self-Model “I used to do a lot of this.”Episodic Memory recorded SBR past actions. • Terminological Self-Model “I know that a penguin is not a bird.”Export the Description Logic TBox into a 2d scene diagram. • Flow of Mental Events Self-Model “I just had an idea how to solve plan X”Short-term memory of “mental events”
Attention Subsystem Persistent Plans Persistent Plans Persistent Plans Planner Plan Execution 3D Reconstruction PlanRecognition Reasoning Scenes Episodic Memory Scene Based Reasoning “Core” Architecture • 20+ subsystems • Explained at http://tinycog.sourceforge.net 3 2 1
Scene Based Reasoning “Core” Architecture Scene Task/Action • We use “Scenes” as a unified representation of internal and world states and as “situations” for the planner. • 3D Scene Graph level – suitable for 3D reconstruction and low-level planning. Reasoning using physics simulation.Reasoning using “diagram reasoning”. • Semantic Network level – “1st Mind”, provides “concepts” and “roles” as an abstraction from object and their attributes.Reasoning using Description Logic reasoning • 2D Graph level – suitable to represent 2D maps, meta-representations of internal data-structure. • “Situation” level – Scenes act as world states and internal states to the planner, adding “dynamics” „Plan“ 1 Goal Start Eat Dinner CleanUp ObtainFood Eat Get pizzafrom Fridge . . . . . . . . . . . . . . . SBR „Core“ Planner 3 Reasoning 2 „Scenes“ 1 „Scene“ Table1 Human1 Type: Table Color: green Position: ... Size: 1 x 1 ... in-front-of Type: Human Gender: malePosition: ... ...
Scene Based Reasoning “Core” Architecture Scene Task/Action • We use “Scenes” as a unified representation of internal and world states and as “situations” for the planner. • Reasoning is performed by several specialized subsystems. • We use Description Logic as a “First Mind” convenient “knowledge assembler“ to classify objects and their attributes into concepts and roles, but not for “higher-level” reasoning. • 2D graph reasoning is a special type of planning. • “Two Minds”: Planning together with the attention, motivational and “persistent goal” subsystems forms a 2nd reasoning system in addition to DL „Plan“ 1 Goal Start Eat Dinner CleanUp ObtainFood Eat 2 Get pizzafrom Fridge . . . . . . . . . . . . . . . SBR „Core“ Planner 3 Reasoning 2 „Scenes“ 1 „Scene“ Table1 Human1 Type: Table Color: green Position: ... Size: 1 x 1 ... in-front-of Type: Human Gender: malePosition: ... ...
Scene Based Reasoning “Core” Architecture Scene Task/Action • We use “Scenes” as a unified representation of internal and world states and as “situations” for the planner. • Reasoning is performed by several specialized subsystems. • The „Planner“ uses Scenes as situations and goals. • “Task decompositions” (HTNs) provide a middle ground between STRIPS style planning and procedural execution and are easy to learn. • Actions may have multiple deterministic outcomes – statistics about actions are collected in the episodic memory. • Physics simulations cover a range of planning capabilities that are difficult to handle using FOL and derivates • A “simulation subsystem” allows for what-if analysis of plans „Plan“ 1 Goal Start Eat Dinner CleanUp ObtainFood Eat 2 Get pizzafrom Fridge . . . . . . . . . . . . . . . SBR „Core“ 3 Planner 3 Reasoning 2 „Scenes“ 1 „Scene“ Table1 Human1 Type: Table Color: green Position: ... Size: 1 x 1 ... in-front-of Type: Human Gender: malePosition: ... ...
Architecture Summary and “Two Minds” • Attention Subsystem controls sensor focus • Persistent Plans for setting plan priorities • Episodic Memory stores plans indexed by content • Plan Recognition allows for 1-shot learning • 20+ subsystems defined at http://tinycog.sourceforge.net Attention Subsystem Persistent Goal Hierarchy Persistent Plans Persistent Plans Planner Plan Execution 3D Reconstruction PlanRecognition Reasoning Scenes Episodic Memory
Self-Models and Self-Referentiality • Physical Volume Self-Model “This is my leg.“Identify the 3D volume of the robot representing SBR and model its capabilities • Capabilities Self-Model „I am good at this.“Performance statistics of task decompositions • Planning Self-Model „I usually hit the goal in 30% of all cases.“Performance statistics of plans performed • Intention Self-Model ”I currently try to do this.“Introspection into the goals currently pursued • Goal Self-Model “I would like to be to do this.“Introspection into active “Persistent Goals” • Social Self-Model “Other group members respect me.“Role of self in group activities. • Behavioral Self-Model “I usually react like this.“Episodic Memory recordings of past SBR actions • Emotional Self-Model “I am happy to hear the news.”Introspection into current emotions and historic model of emotions • Historical Self-Model “I used to do a lot of this.”Episodic Memory recorded SBR past actions. • Terminological Self-Model “I know that a penguin is not a bird.”Export the Description Logic TBox into a 2d scene diagram. • Flow of “Thoughts” Self-Model “I was surprised by this event”Short-term memory (“time-line”) of “mental events”
Goal Start Dinner • hasskin • eats • breathes • moves Animal CleanUp ObtainFood Eat • has wings • can fly • has feathers Bird Get pizzafrom Fridge . . . . . . Fish . . . . . . . . . • has fins • can swim • has gills • can sing • is yellow Canary • !can fly • can swim Penguin Examples of Scenes representing Self-Models: Plan & DL-TBox • Modalities examples: • „My goal is ...“ • „I believe that...“ • Explicit representation of data-structures • No need to use modal or higher order logic • Apply the same reasoning engine as to object-level data
Self-Models and Self-Referentiality Physical • Physical Volume Self-Model “This is my leg.“Identify the 3D volume of the robot representing SBR and model its capabilities • Capabilities Self-Model „I am good at this.“Performance statistics of task decompositions • Planning Self-Model „I usually hit the goal in 30% of all cases.“Performance statistics of plans performed • Intention Self-Model ”I currently try to do this.“Introspection into the goals currently pursued • Goal Self-Model “I would like to be to do this.“Introspection into active “Persistent Goals” • Social Self-Model “Other group members respect me.“Role of self in group activities. • Behavioral Self-Model “I usually react like this.“Episodic Memory recordings of past SBR actions • Emotional Self-Model “I am happy to hear the news.”Introspection into current emotions and historic model of emotions • Historical Self-Model “I used to do a lot of this.”Episodic Memory recorded SBR past actions. • Terminological Self-Model “I know that a penguin is not a bird.”Export the Description Logic TBox into a 2d scene diagram. • Flow of “Thoughts” Self-Model “I was surprised by this event”Short-term memory (“time-line”) of “mental events” Planning Social Internal