Download
1 / 1
10 likes | 102 Views
t. Z. 2. k. (. ). (. ). k. d. ¡. q. ¿. q. ¿. ¿. d. t. t. T. Z. 0. ^. ^. h. i. W. V. T. 2. T. T. T. ,. k. (. ). k. d. (. ). :. :. :. _. Ä. 1. U. (. ). (. ). t. +. x. _. _. (. (. ). (. ). ). (. ). u. ¿. ¿. =. (. ). q. q. q. q.

E N D
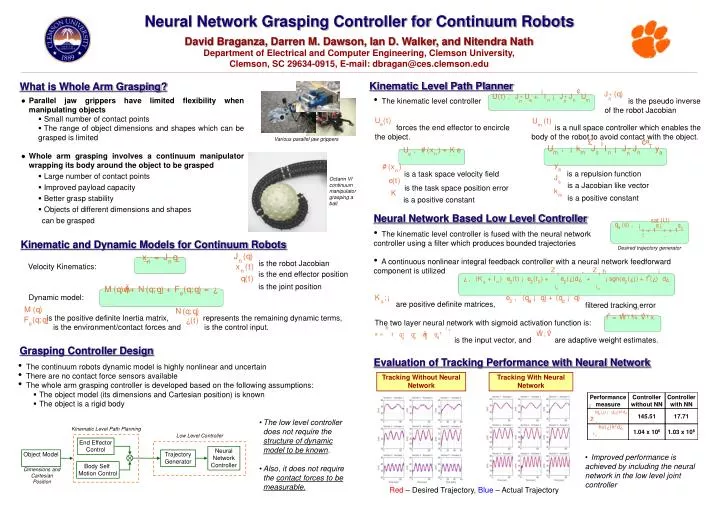
t Z 2 k ( ) ( ) k d ¡ q ¿ q ¿ ¿ d t t T Z 0 ^ ^ h i W V T 2 T T T , k ( ) k d ( ) : : : _ Ä 1 U ( ) ( ) t + x _ _ ( ( ) ( ) ) ( ) u ¿ ¿ = ( ) q q q q k # J J K K ¡ U ¡ + ¡ U s a ; d t t t d d d e q q q q , y e ( x ( ( ( q ) ) d ) ) d 2 ³ ´ N F M _ _ ( ) t ( ) ^ ^ ^ a m s s n ( ) e T T t m ; ¿ q q q q q q s n ( ) t , t d J ¡ ¢ + + t t f W V q 0 · ¸ ( ) ¹ U J U I J J U 3 Z Z x e ; ; t , + ¡ ¾ x q = ¡ ¢ ¡ ¢ h i ( ) s s # n U K 1 1 ^ , + + + n e n n m ( ) ( ) ( ) ( ) ( ( ) ) ( ) T x e d f d K I ¡ n n t t + ¡ + + + , £ ¡ ¢ ¤ + ¿ e e e ¿ ¿ s g n e ¿ ¿ ¿ e n 2 2 0 2 2 ² · k U J I J J s n ¡ ¡ ( ) ( ) ( ) M N F Ä _ _ y + + J q q q q q q ¿ _ _ m m s n n a t t = n 0 0 x q e ; = ; n n Kinematic Level Path Planner What is Whole Arm Grasping? • Parallel jaw grippers have limited flexibility when manipulating objects • Small number of contact points • The range of object dimensions and shapes which can be grasped is limited • Whole arm grasping involves a continuum manipulator wrapping its body around the object to be grasped • Large number of contact points • Improved payload capacity • Better grasp stability • Objects of different dimensions and shapes can be grasped is the pseudo inverse of the robot Jacobian • The kinematic level controller forces the end effector to encircle the object. is a null space controller which enables the body of the robot to avoid contact with the object. Various parallel jaw grippers is a repulsion function is a task space velocity field Octarm VI continuum manipulator grasping a ball is a Jacobian like vector is the task space position error is a positive constant is a positive constant Neural Network Based Low Level Controller • The kinematic level controller is fused with the neural network controller using a filter which produces bounded trajectories Kinematic and Dynamic Models for Continuum Robots Desired trajectory generator • A continuous nonlinear integral feedback controller with a neural network feedforward component is utilized is the robot Jacobian Velocity Kinematics: is the end effector position is the joint position Dynamic model: are positive definite matrices, filtered tracking error is the positive definiteInertia matrix, represents the remaining dynamic terms, is the environment/contact forces and is the control input. The two layer neural network with sigmoid activation function is: is the input vector, and are adaptive weight estimates. Grasping Controller Design Evaluation of Tracking Performance with Neural Network • The continuum robots dynamic model is highly nonlinear and uncertain • There are no contact force sensors available • The whole arm grasping controller is developed based on the following assumptions: • The object model (its dimensions and Cartesian position) is known • The object is a rigid body Tracking Without Neural Network Tracking With Neural Network Performance measure Controller without NN Controller with NN 145.51 17.71 • The low level controller does not require the structure of dynamic model to be known. • Also, it does not require the contact forces to be measurable. 1.04 x 106 1.03 x 106 Kinematic Level Path Planning Low Level Controller End Effector Control Neural Network Controller Object Model Trajectory Generator • Improved performance is achieved by including the neural network in the low level joint controller Body Self Motion Control Dimensions and Cartesian Position Red – Desired Trajectory,Blue – Actual Trajectory