Download
1 / 1
10 likes | 238 Views
Prodding. Pinching. Cutting. Virtual Reality Surgery Simulation using Haptics and Boundary Element Techniques Peiji Wang 1 , Tony Glover 2 , Adib Becker 1 , Arthur Jones 1 , Steve Benford 2 , Chris Greenhalgh 2 and Michael Vloeberghs 3.

E N D
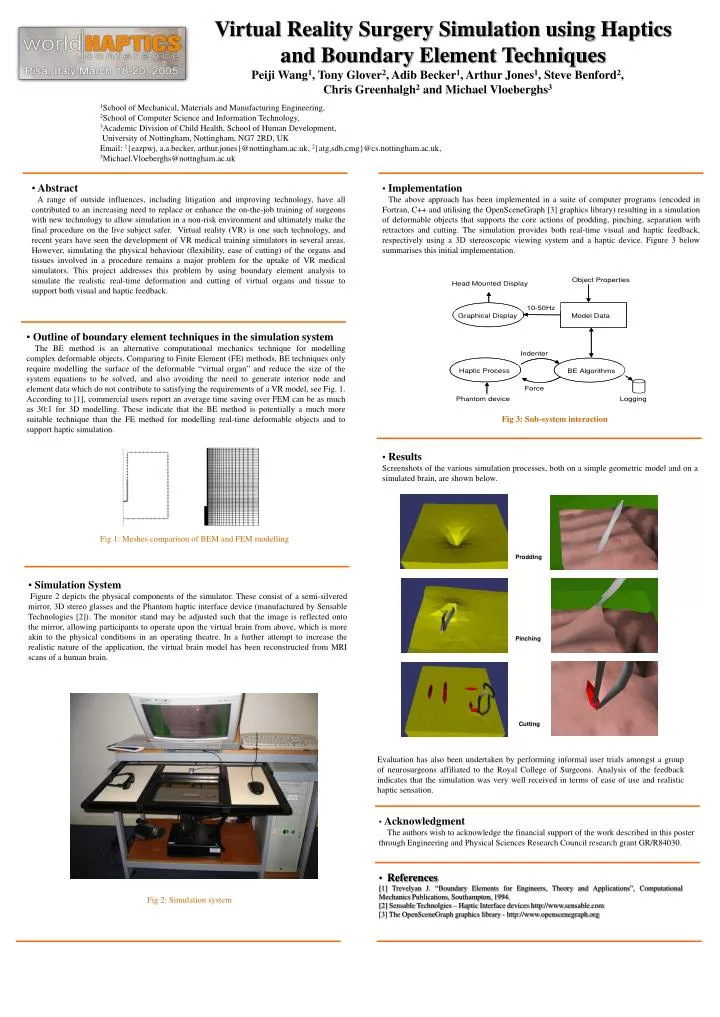
Prodding Pinching Cutting • Virtual Reality Surgery Simulation using Haptics • and Boundary Element Techniques • Peiji Wang1, Tony Glover2, Adib Becker1, Arthur Jones1, Steve Benford2, • Chris Greenhalgh2 and Michael Vloeberghs3 1School of Mechanical, Materials and Manufacturing Engineering, 2School of Computer Science and Information Technology, 3Academic Division of Child Health, School of Human Development, University of Nottingham, Nottingham, NG7 2RD, UK Email: 1{eazpwj, a.a.becker, arthur.jones}@nottingham.ac.uk, 2{atg,sdb,cmg}@cs.nottingham.ac.uk, 3Michael.Vloeberghs@nottngham.ac.uk • Abstract • A range of outside influences, including litigation and improving technology, have all contributed to an increasing need to replace or enhance the on-the-job training of surgeons with new technology to allow simulation in a non-risk environment and ultimately make the final procedure on the live subject safer. Virtual reality (VR) is one such technology, and recent years have seen the development of VR medical training simulators in several areas. However, simulating the physical behaviour (flexibility, ease of cutting) of the organs and tissues involved in a procedure remains a major problem for the uptake of VR medical simulators. This project addresses this problem by using boundary element analysis to simulate the realistic real-time deformation and cutting of virtual organs and tissue to support both visual and haptic feedback. • Implementation • The above approach has been implemented in a suite of computer programs (encoded in Fortran, C++ and utilising the OpenSceneGraph [3] graphics library) resulting in a simulation of deformable objects that supports the core actions of prodding, pinching, separation with retractors and cutting. The simulation provides both real-time visual and haptic feedback, respectively using a 3D stereoscopic viewing system and a haptic device. Figure 3 below summarises this initial implementation. • Outline of boundary element techniques in the simulation system • The BE method is an alternative computational mechanics technique for modelling complex deformable objects. Comparing to Finite Element (FE) methods, BE techniques only require modelling the surface of the deformable “virtual organ” and reduce the size of the system equations to be solved, and also avoiding the need to generate interior node and element data which do not contribute to satisfying the requirements of a VR model, see Fig. 1. According to [1], commercial users report an average time saving over FEM can be as much as 30:1 for 3D modelling. These indicate that the BE method is potentially a much more suitable technique than the FE method for modelling real-time deformable objects and to support haptic simulation. Fig 3: Sub-system interaction • Results • Screenshots of the various simulation processes, both on a simple geometric model and on a simulated brain, are shown below. Fig 1: Meshes comparison of BEM and FEM modelling • Simulation System • Figure 2 depicts the physical components of the simulator. These consist of a semi-silvered mirror, 3D stereo glasses and the Phantom haptic interface device (manufactured by Sensable Technologies [2]).The monitor stand may be adjusted such that the image is reflected onto the mirror, allowing participants to operate upon the virtual brain from above, which is more akin to the physical conditions in an operating theatre. In a further attempt to increase the realistic nature of the application, the virtual brain model has been reconstructed from MRI scans of a human brain. Evaluation has also been undertaken by performing informal user trials amongst a group of neurosurgeons affiliated to the Royal College of Surgeons. Analysis of the feedback indicates that the simulation was very well received in terms of ease of use and realistic haptic sensation. • Acknowledgment • The authors wish to acknowledge the financial support of the work described in this poster through Engineering and Physical Sciences Research Council research grant GR/R84030. • References • [1] Trevelyan J. “Boundary Elements for Engineers, Theory and Applications”, Computational Mechanics Publications, Southampton, 1994. • [2] Sensable Technolgies – Haptic Interface devices http://www.sensable.com • [3] The OpenSceneGraph graphics library - http://www.openscenegraph.org Fig 2: Simulation system