Download
1 / 22
220 likes | 231 Views
Lecture 4 SE201. Design Process: Automation/Control. Previous Lecture: Design. System’s specification The four different characteristics to meet in design General Approach Control system design process Design examples. Four Important characteristics. Complexity of the design:

E N D
Lecture 4 SE201 Design Process: Automation/Control
Previous Lecture: Design • System’s specification • The four different characteristics to meet in design • General Approach • Control system design process • Design examples
Four Important characteristics • Complexity of the design: • Tools, issues and knowledge to be used in the process • Trade-off: • Judgment about compromises between desirable conflicting criteria.
Risk: • due to the fact that the final product generally does not appear the same as it had been originally visualized. • The result is that designing a system is a risk-taking activity. • Design Gaps: • Process is iterative and can be improved incrementally
Approach • The main approach to the most effective engineering design is parameter analysis and optimization. • Parameter analysis is based on • (1) identification of the key parameters, • (2) generation of the system configuration, • (3) evaluation of how well the configuration meets the needs. These three steps form an iterative loop. The objective is to optimize the parameters.
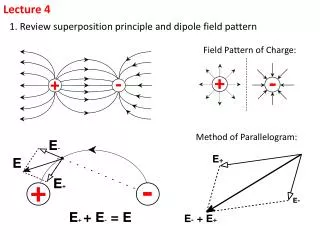
Design of Turntable speed Control • Problem Formulation : Many modern devices use a turntable to rotate a disk at a constant speed. For example, a CD player, a computer disk drive, and a phonograph record player all require a constant speed of rotation in spite of motor wear and variation and other component changes. Our goal is to design a system for turntable speed control that will ensure that the actual speed of rotation is within a specified percentage of the desired speed. We will consider a system without feedback and a system with feedback.
The Design System design Process 1. Establish control goals 2. Identify variables to control • Example: Control the velocity of a motor • Example: the velocity of the motor • Example: ± 2% of error Selection of sensors to measure the controlled variable • Example: Negative feedback system block Configuration; Actuator: Voltage generator, dc motor; Motor pump and valve. • Example: Physical model, differential equation. modeling • Example: Summing amplifier 3. Write the specifications for the variables 4.0 Establish the system Configuration and identify the actuator 5.0 Obtain a model of the process, the actuator and the sensor 6.0 Describe a controller and select the key parameters to be adjusted + K - 7.0 Optimize the parameters and Analyze the performance. If the performance does not meet the specification then iterate the Configuration and the actuator If the meet the specification then finalize the design
Performance Specification • Describe how the closed-loop should perform. It includes: • Good regulation against disturbance • Desirable response to command • Realistic actuator signals • Low sensitivity • Robustness
Component DC Motor (Actuator) Amplifier Battery For closed loop Justification Liner relation speed vs voltage Battery does not have enough power to drive the DC motor Need for a source Sensors Component Selection
Design Example I: Turntable Speed Control Open Loop Closed loop
approach to dynamic system problems can be listed as follows: • 1. Define the system and its components. • 2. Formulate the mathematical model and list the necessary assumptions. • 3. Write the differential equations describing the model. • 4. Solve the equations for the desired output variables. • 5. Examine the solutions and the assumptions. • 6. If necessary, reanalyze or redesign the system.
Vehicle Dynamics Movement around Center of Gravity
Suspension Components Suspension Tire Acts as a Spring-Mass-Damper Springs and Dampers Most Common Suspension Type
Quarter Car Suspension • Quarter Car models one-fourth of a automobile suspension. • Only Captures Vertical Movement.
Half Car Suspension • Incorporates Two Quarter Car models connected with a Beam. • Allows modeling of pitch as well as body position.
Full Car Suspension • Advantages • Captures all of the motions of a real vehicle • Pitch and Roll can be evaluated simultaneously with vertical compliance • Disadvantages • Existing Full-Car Models are expensive • New Models are difficult to develop
Desired – Measured Output Output Comparison Actuator Process Desired Output Output Positive feedback -> Error is increasing Measurement Negative feedback system blockConfiguration Slide 10
Detailed Non-Linear Model Detailed Linear Model Real System Linear Model Modeling
Parameter Calculation Parameter Identification Design Detailed Non-Linear Model Detailed Linear Model Real System Linear Model Analysis Validation and Verification Use of the different Models
Modeling Techniques Differential equations: Physically Based Models State space Formulation Transfer Functions Representation Block Diagrams Give a very good understanding of the different functionality of the system back to slide 5