Download
1 / 70
720 likes | 1.19k Views
Perception of Depth. Perception of Depth. Cues to depth: 1. Oculomotor 2. Monocular 3. Binocular. Convergence Divergence. The Retinal Image is 2-D, but what information is available to construct the 3-D environment?. Oculomotor Cues. c) Accommodation.

E N D
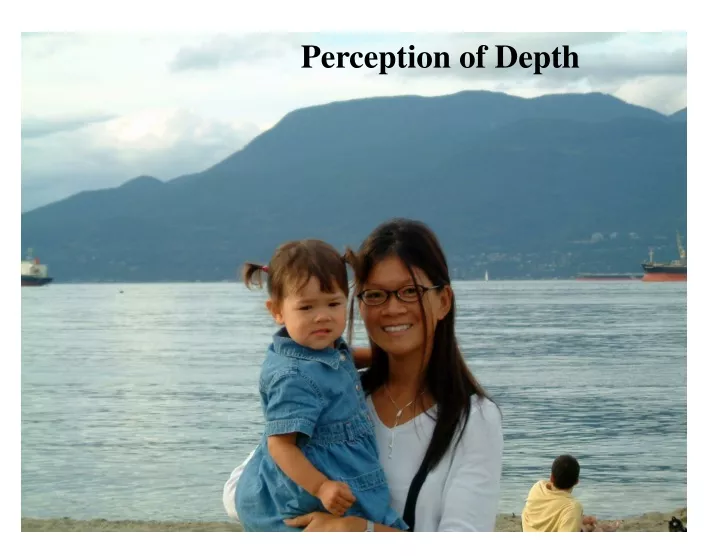
Perception of Depth Cues to depth: 1. Oculomotor 2. Monocular 3. Binocular
Convergence Divergence The Retinal Image is 2-D, but what information is available to construct the 3-D environment? Oculomotor Cues
c) Accommodation The shape of the lens changes as a function of the distance of an object Oculomotor Cues
a) Occlusion (overlapping object is closer) b) Size in the field of view (bigger is closer) Monocular (pictorial) Cues c) height in the field of view (higher base is farther away) d) familiarity (sizes that we “know”)
Monocular (pictorial) Cues a) Occlusion (overlapping object is closer) b) Size in the field of view (bigger is closer) c) height in the field of view (higher base is farther away)
Pictorial depth cues: occlusion, “relative” size & height, shadows
Pictorial Cues Linear Perspective “Perceptual convergence”
Linear perspective: lines perceived as parallel that “travel” toward a “vanishing point”
Pictorial Cues texture gradient Relates to “ground” All other cues relate (size, height, linearity, occlusion, shadows, familiarity)
Relative height: objects higher (& smaller) in the picture are perceived as farther away
If the object is smaller and lower in the frame, the object is perceived as near, but relatively smaller
Pictorial Cues atmospheric perspective (aerial perspective) The higher & hazier contours are “hazier” because they are farther away (more air, moisture, dust to look through)
Pictorial cues: atmospheric cues Higher & hazier Lower & sharper
Pictorial Cues Implied lighting & shadows: shading
b) Deletion (covered)/Accretion Motion Cues: reconfiguration of the visual field
b) Deletion/Accretion (uncovered) Motion Cues: reconfiguration of the visual field
a) Motion parallax • When an observer moves, closer object moves a greater number of degrees of visual angle on retina than further objects • Subjective impression: objects nearer the observer move faster than more distant objects Motion Cues One Eye: Position 1 T A H A Position 2 H B T B
Monocular (pictorial) Depth Cues • Occlusion • Size • Height • Familiarity • Linear Perspective • Texture Gradient • Atmospheric (aerial) Perspective • Shading: Lighting & Shadows • Movement Cues: (i) Deletion/Accretion; (ii) Motion Parallax
Test the size of your monocular and binocular visual fields • Close one eye at a time • Move your thumb across the visual field of each eye individually • About how wide is your monocular field? • About how wide is your binocular field? • How different is the perspective of any one point in your binocular field when you switch from one eye to the other?
Depth cues with Bi (two) nocular (eyes) disparity • Binocular disparity: difference (“disparity”) between the two points of view of the left and right eyes (retina) • Stereopsis: Experience of depth from the joining together of left/right views at the level of the higher brain areas (LGN & cortex) • Corresponding retinal points: specific location on each retina that communicates up to the identical receptive area of the cortex
fixate blue object: image falls on corresponding points (identical locations) on both left and right retinas Binocular Disparity for Stereopsis: The Horoptor and corresponding retinal points horopter – imaginary “circle” that passes through the point of fixation all images that are on the horopter fall on the exact same corresponding points on both retinas
Images on the horopter share a corresponding retinal point Images not on the horopter are on different points on the retina
images of objects not on the horopter fall on non-corresponding points on the retina Binocular Disparity for Stereopsis angle of disparity Fovea
the further away from the horopter, the greater the angle of disparity Binocular Disparity for Stereopsis
things behind the horopter are in uncrossed disparity (you’d have to “uncross” or diverge your eyes to see it clearly) Binocular Disparity for Stereopsis things in front of the horopter are in crossed disparity (you’d have to “cross” or converge your eyes to see it clearly)
Binocular Depth Cells in Visual Cortex (striate cortex, V1) are disparity specific Disparity selective cell Also called “Disparity Detectors”
Perceiving Size “Whiteout” is one of the most treacherous weather conditions possible for flying. Frank pilots his helicopter across the Antarctic wastes, blinding light, reflected down from thick cloud cover above, and up from the pure white blanket of snow below, making it difficult to find the horizon, or to know “up” from “down.” He thinks he can make out a vehicle on the snow below and he drops a smoke grenade to check his altitude. To his horror, the grenade falls only three feet before hitting the ground. Realizing that what he thought was a truck was actually a discarded box, Frank pulls back on the controls and soars up… drenched in sweat, he realizes how close he just came to a whiteout fatality…
comparison circle test circles 1 deg Holway and Boring (1941): relation between size & distance (depth cues)? Where the subject was standing Task for subjects: match the size of the “comparison” light exactly to the same size (diameter) of the test light. Condition 1: do matching with lots of depth cues Condition 2: do matching with fewer depth cues Note: the test stimulus light is always the same retinal size (1 degree)
comparison circle test circles 1 deg Where the subject was standing Holway and Boring (1941) With depth cues: • Subjects accurately matched the physical size of the “comparison” and “test” stimulus lights • Made match regardless of how far away (and despite the fact that retinal images were the same sizes) Without depth cues: • Subjects routinely got the literal size of the stimulus wrong • Matched the visual angle so that “comparison” and “test” lights were always the same size on the retina • All “test” stimuli were believed to be the same size regardless of how close they were (all at 1-degree angle), so they looked the same
A A Conclusions from Holway & Boring (1941): Perceived Depth and Size of objects MUST Be codependent - We need depth information to accurately make judgments about size - In the absence of depth information we determine the size of objects by the size of the image that they cast on our retina
Sp ) (R D p = X Emmert's Law: size-distance scaling equation - Our perception of size equals the size of the Retinal image times the perceived distance away S = perceived size R = size on the retina D = perceived distance
Experiencing Emmert's Law first hand: - the farther away an afterimage appears, the larger we perceive its size If we look for the afterimage against a far wall the image looks much larger If we look for the afterimage on a piece of paper right in front of us, it looks smaller
Size of the afterimage, determined by how far away we look (or we think we look) to see the image Look against a far wall Look at a piece of paper on your desk Bleached out cones in fovea (after-image) Look against a near wall Emmert's Law: perceived size equals retinal size times perceived distance
Sp ) (R D p = X Emmert's Law: size-distance scaling equation - Our perception of size equals the size of the Retinal image times the perceived distance away S = perceived size R = size on the retina D = perceived distance