Download
1 / 29
841 likes | 1.6k Views
US Navy Seaweb program Undersea acoustic sensing, signaling, communications & networks. Networked through-water digital com/nav Scalable wide-area wireless grid Composable architectural flexibility Fixed and mobile autonomous nodes Gateways to command centers Persistent and pervasive

E N D
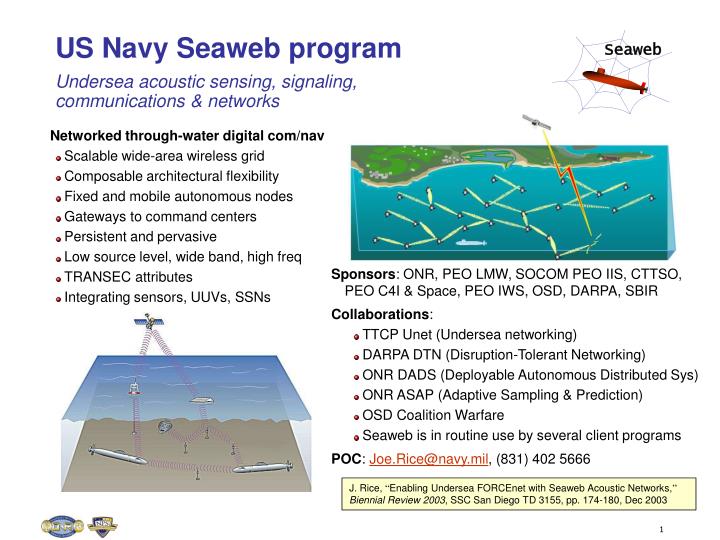
US Navy Seaweb programUndersea acoustic sensing, signaling, communications & networks • Networked through-water digital com/nav • Scalable wide-area wireless grid • Composable architectural flexibility • Fixed and mobile autonomous nodes • Gateways to command centers • Persistent and pervasive • Low source level, wide band, high freq • TRANSEC attributes • Integrating sensors, UUVs, SSNs • Sponsors: ONR, PEO LMW, SOCOM PEO IIS, CTTSO, PEO C4I & Space, PEO IWS, OSD, DARPA, SBIR • Collaborations: • TTCP Unet (Undersea networking) • DARPA DTN (Disruption-Tolerant Networking) • ONR DADS (Deployable Autonomous Distributed Sys) • ONR ASAP (Adaptive Sampling & Prediction) • OSD Coalition Warfare • Seaweb is in routine use by several client programs • POC: Joe.Rice@navy.mil, (831) 402 5666 J. Rice, “Enabling Undersea FORCEnet with Seaweb Acoustic Networks,”Biennial Review 2003, SSC San Diego TD 3155, pp. 174-180, Dec 2003
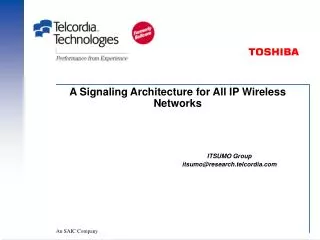
Iridium satellite Ashore & afar command centers Racom buoy with Iridium, FreeWave, Telesonar UUVs ASW / ISR / MCM nodes Float SDV Telesonar modem Telesonar repeater nodes Acoustic release SSN/SSGN with Seaweb server Weight US Navy Seaweb programApplied research, “Discovery & Invention”, 6.2 fundingArt of the possible for Maritime sensor networks & Undersea Distributed Networked Systems (UDNS)
SPAWAR SBIR topic N93-170 advanced and commercialized DSP-based acoustic comms SBIR contractor: Teledyne Benthos (formerly Datasonics, Inc.) Pre-SBIR ATM-845 ATM-865 SBIR Phase-2 ATM-875 SBIR Phase-3 ATM-885 • 2000-2007 • TMS320C5410 • 3rd generation telesonar • Spiral development • 1993-97 • all analog • 10 b/s FSK • 1997-99 • TMS320C50 • 2nd generation telesonar • Spiral development SBIR Phase-1 ATM-850 (not shown) 1997-2003 achievement: • Stable COTS hardware • COTS & Navy firmware • 8X less expensive • 40X more efficient • 1995-97 • Multi-band MFSK • 1st generation telesonar • Technology transfer from MIT/WHOI 2007: 4th gen telesonar with TRANSEC features
TBEDNavy’s first experimental digital sensor network1995-96 • “TBED” Telemetry Buoy Environmental Data • NSWC Coastal Systems Station, Panama City, FL • Objective: telemeter environmental data from distributed seafloor sensor nodes to one or more gateway nodes • Sea test in 1996 • Gulf of Mexico, 60 km offshore Panama City, 45-m water • 8-km node-to-node ranges achieved • 4 Datasonics ATM-850 telesonar modems • 150-bit/s, 1024-bit messages • Flooding protocol designed for up to 10 nodes • Advantages: Simple, COTS modem firmware, Plug & play, Routing tables not required, Centralized control not required • Disadvantages: Redundant communications, Not bandwidth efficient for fixed network, High latency • Analogous to terrestrial “Zebranet” • Well suited for delay-tolerant AUV mobile networks J. Rice, et al, “Evolution of Seaweb Underwater Acoustic Networking”Proc IEEE Oceans 2000
1 km Racom-1 Seaweb ’98 engineering experimentBuzzards Bay, MA, September 1999An undersea wireless sensor network employing ten telesonar modems and an RF gateway buoy 41°43´ 10-m water depths 10 ATM-875 telesonar modems 3-FDMA 3 sensor nodes FreeWave gateway Bi-directional routing tables Scaleable architecture ATM-875 Isobath contours at 5-meter intervals 41°35´ 70°46´ 70°36´ M. D. Green, J. A. Rice and S. Merriam, “Underwater acoustic modem configured for use in a local area network,”Proc. IEEE Oceans ’98 Conf., Vol. 2, pp. 634-638, Nice France, September 1998
Seaweb ’99 engineering experimentBuzzards Bay, MA, August 1999SSC San Diego, Delphi, Benthos, SAIC FreeWave 900-MHz LOS gateway Cellular Digital Packet Data (CDPD) gateways Seaweb server 15 ATM-875 nodes Seaweb ‘99 firmware FDMA-6 network Node addressing Ranging Handshake protocol Adaptive power control Remote-controlled routing Commercial sensors J. Rice, et al, “Evolution of Seaweb Underwater Acoustic Networking”Proc IEEE Oceans 2000
Seaweb 2000 engineering experiment Buzzards Bay, Aug-Sept 2000 ATM-885 modems FreeWave LOS gateway Cellular Digital Packet Data (CDPD) gateways Asynchronous TDMA Rerouting RTS/CTS handshake + ARQ Isobath contours at 5-meter intervals
FRONT-4 Jan-June, 2002 Demonstrated capabilities:FRONT ocean observatoryNational Oceanographic Partnership Program FRONT-3 March-June, 2001 Concept D. L. Codiga, et al, “Networked Acoustic Modems for Real-Time Data Telemetry from Distributed Subsurface Instruments in the Coastal Ocean: Application to Array of Bottom-Mounted ADCPs,”J. Atmospheric & Oceanic Technology, June 2005
US participation in Canada’s ICESHELF 2002 April experiment in the Arctic Ocean • 80-150 m water covered by rough ice of 2-8 m thickness and large subsurface ridges and keels • Upward-refracting water • Ice-mounted Seaweb network, first test of acoustic networking in the Arctic • Prepares for RDS-4 experiment with interoperable US and Canadian ASW sensor nodes
Demonstrated capabilities:FBE India June 2001 Racom buoy • (Prior Seaweb tests with USS Dolphin submarine: Sublinks ’98, ’99, 2000) • SSN with BSY-1 sonar Seaweb TEMPALT • Ashore ASW command center • Seaweb server at SSN and ASWCC • Acoustic chat and GCCS-M links to fleet • SSN/MPA cooperative ASW against XSSK • Flawless ops for 4 continuous test days Experimental DADS sensor node J. Rice, et al, “Networked Undersea Acoustic Communications Involving a Submerged Submarine, Deployable Autonomous Distributed Sensors, and a Radio Gateway Buoy Linked to an Ashore Command Center,”Proc. UDT Hawaii, October 2001
CTS RTS RTS CTS DATA RTS DATA CTS RTS CTS DATA DATA Seaweb message example:Multi-Access Collision Avoidance (MACA)Internet Protocol (IP) Fixed routing tables Precursor to Seaweb cellular routing Source node G. Hartfield, Performance of an Undersea Acoustic Network during Fleet Battle Experiment India, MS Thesis, Naval Postgraduate School, Monterey, CA, June, 2003 Destination node
Demonstrated capabilities:Seaweb network with UUVsUS/Canada collaborationGulf of Mexico, Feb 1-8, 2003 UUV nose section Iridium satellite radio links Over-the-horizon command center Shipboard command center 2 Racom buoy gateway nodes FreeWave radio links • Mobile gateway nodes • Mobile sensor nodes • 200 km logged by UUVs • 300 hrs logged by UUVs • Node-to-multinode comm/nav 6 fixed repeater nodes 3 glider UUV mobile nodes
NPS Seaweb navigation developmentSeaweb 2005 UUV ExperimentsMonterey Bay, May 9-11, July 20-22St. Andrews Bay, December 5-9 GPS satellite constellation Iridium satellite constellation Racom buoy gateway node Shipboard command center ARIES UUV M. Hahn, Undersea Navigation via a Distributed Acoustic Communications Network, MS Thesis, Naval Postgraduate School, June 2005 S. Ouimet, Undersea Navigation of a Glider UUV using an Acoustic Communications Network, MS Thesis, Naval Postgraduate School, Sept 2005 Slocum UUV EMATT UUV constellation of 6 Seaweb repeater nodes fixed on seabed M. Reed, Use of an Acoustic Network as an Underwater Positioning System, MS Thesis, Naval Postgraduate School, June 2006
(d) Networked telemetry (c) Echoes (b) Broadcast ping (a) Networked command Demonstrated capability:All Seaweb communications yield the node-to-node range as a by-product of the link-layer RTS/CTS handshake.The broadcast ping command returns ranges to all neighboring nodes.
Seaweb cellular grid deployment Theater ASW Experiment – TASWEX 04 Submarine comms @ speed & depth (CSD) Average speed 6.5 knots Average 1 repeater every 20 min
COMEX Seaweb 2004 grid post mortem Impacted by trawling along the 300-m isobath3 nodes removed, 6 nodes displaced or damaged FINEX FINEX H. Kriewaldt, Communications Performance of an Undersea Acoustic Wide-Area Network, MS Thesis, Naval Postgraduate School, December 2005
Seaweb 2005 experimentFebruary 2005, Panama City, FL SRQ link-layer mechanism NSMA (Neighbor Sense Multiple Access, a cross-layer variation on CSMA) Ranging and node localization Iridium-equipped Racom buoy Compressed image telemetry NPS, SSCSD, CSS, Benthos
8. Node A retransmits the 1 subpacket specified by the SRQ. Demonstrated capability:Selective Automatic Repeat Request (SRQ) is a link-layer mechanism for reliable transport of large datafiles even when the physical layer suffers high BERs Node A Node B RTS 2. Node B is prepared to receive a large Data packet as a result of RTS/CTS handshaking. 1. Node A initiates a link-layer dialog with Node B. CTS HDR 4. Node B receives 12 subpackets successfully; 4 subpackets contained uncorrectable bit errors. 3. Node A transmits a 4000-byte Data packet using 16 256-byte subpackets, each with an independent CRC. 5. Node B issues an SRQ utility packet, including a 16-bit mask specifying the 4 subpackets to be retransmitted. 7. Node B receives 3 of the 4 packets successfully (future implementation of cross-layer time-diversity processing will recover 4 of 4). B issues an SRQ for the remaining subpacket. SRQ 6. Node A retransmits the 4 subpackets specified by the SRQ mask. HDR 9. Node B successfully receives and processes Data packet. SRQ HDR J. Kalscheuer, A Selective Automatic Repeat Request Protocol for Undersea Acoustic Links, MS Thesis, Naval Postgraduate School, June 2004
Seaweb telesonar repeater node • Seaweb telesonar modem, circa 2000-2007 • Texas Instruments TMS320C5410 DSP • Teledyne Benthos COTS hardware • US Navy firmware • Spectral bandwidth = 5 kHz (9-14 kHz) • SL = 174 dB (typ) re 1μPa @ 1m • Modulation = Multi-channel 4-FSK • Forward Error Correction • Raw bit rate = 2400 bit/s • Data packets = 800 b/s • Utility packets = 150 b/s • DI = 0 dB (omni) • DI = 0 dB (omni) K. Scussel, “Acoustic Modems for Underwater Communications,”Wiley Encyclopedia of Telecommunications, Vol. 1, pp. 15-22, Wiley-Interscience, 2003
Transmit/Receive Board Digital Board ATM-885 board set New ATM-900 board set Small Business Innovative ResearchSBIR N03-224 is producing the 4th-gen telesonar modemContractor: Teledyne Benthos, Inc.Sponsor: PEO C4I & Space, PMW 770 Spectral bandwidth up to 20 kHz, Operating frequency up to 70 kHz Processing speed increased by 2X, Memory increased by 20X Xmit efficiency improved by 50%, Rcvr efficiency improved by 50% One new digital board can support 4 T/R boards (for multi-band, MIMO, spatial diversity, etc) SBIR Ph-2 Option will integrate SBIR N99-011 directional ducer (Image Acoustics, Inc) SBIR Ph-3 5-year delivery-order contract being negotiated by SSC San Diego
Analyze mission requirements Measure or predict environment Model transmission channels Predict connectivity range limits Specify spacing, aperture, and node mix Pre-program master node only Preparation 5 days Installation 1 day Activation 1 hr Obey spacing constraints Test master node link to gateway Awaken network nodes Discover neighbors Obtain reciprocal channel response Perform 2-way ranging Sound own depth Initialize spectral shaping Report link data & node configuration Assimilate data at master node Initiation 2 hrs Registration 1 hr Optimization 1 hr Operation 90 days Compute optimal/alternate routes Assign protocols Monitor energy, links, and gateways Optimize life, TRANSEC, and latency Current workThe Seaweb network organizes and maintains itself under the control of autonomous master nodes or Seaweb servers at command centers
Node A Node B Current researchAdaptive modulation Demodulate RTS transmission Reconstruct transmitted waveform RTS Estimate channel scattering function CTS Specify Data-packet comms parameters Determine h(τ, t ) / Doppler / SNR S. Dessalermos, Undersea Acoustic Propagation Channel Estimation, MS Thesis, Naval Postgraduate School, Monterey, CA, June 2005 Data Map channel characteristics against available repertoires and signal techniques Decision
Current researchAsymmetric links Low-rate C2 Submarine High-rate data telemetry Autonomous node
Unet through-water acoustic signaling range regimesCategorized at Unet Workshop 5 and refined at Unet Workshop 6
Acoustic link budget Each term in the standard radio link budget is analogous to specific quantities in the sonar equation. SNR(f) = PSL(f) – TL(f) – AN(f) + DIxmt(f) + DIrcv(f) We develop the acoustic link budget as a wideband model because, unlike most radio channels, the acoustic channel exhibits strong frequency dependency. PSL pressure spectrum level AN DIxmt DIrcv TL SNR Pxmt Prcv
PSL W= 20kHz Sonar equation analysis (TL+AN) for 500-m range and 4 noise spectra TL + NSL (dB re 1μPa) Frequency (kHz)
Current researchSeastar local-area networks Asymmetric links: high-BW links from peripheral nodes to central node; low-BW links from central node to peripherals and peer-to-peer Point-to point communications at short ranges (50 to 500 m) employ the 30-100 kHz band • Data are fused/beamformed at the central node • Seastar LAN increases the carrying capacity of the undersea environment by an order of magnitude • Central node reports compressed information through the wide-area network • Applications include sensor arrays, sensor clusters, autonomous MCM vehicles, and SDV/DDS dive teams • DADS magnetometer array a near-term pilot application • Prototype Seastar at AUVfest 2007, 2 NPS thesis students • ONR 321MS 6.2 funding Seaweb WAN Seastar LAN
NPS G G G G R R R R H K K U U FBE-I, 2001 Q Over 40 Seaweb deploymentsSpirally developed USW com/nav capability Iceweb, 2002 Q272 Seaweb GoM, 2003 RDS-4, 2002 FRONT-4, 2002 TASWEX04 Seaweb NSW, 2004