Download
1 / 20
210 likes | 427 Views
Scale effects on locomotion: how the optimal gait changes according to dimensions. Umberto Scarfogliero , Cesare Stefanini, Paolo Dario. Scuola Superiore Sant’Anna, CRIM Lab IMT Lucca Institute for Advanced Studies. How scale effects influence locomotion?.

E N D
Scale effects on locomotion: how the optimal gait changes according to dimensions Umberto Scarfogliero, Cesare Stefanini, Paolo Dario Scuola Superiore Sant’Anna, CRIM Lab IMT Lucca Institute for Advanced Studies
How scale effects influence locomotion? • Investigate scale effects on locomotion in different sized animals. • Build a robotic platform for scientific investigation on jumping in small animals
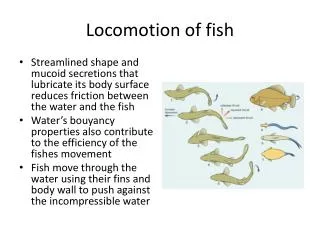
Scale effects in animals Starting from the observation that smaller fast animals take longer step length compared to their leg length, a locomotion strategy for small legged robots has been investigated [1] Despite the energetic cost per gram per stride is almost constant along different sized animals running at equivalent speed, smaller animals are generally less efficient than bigger ones. This because the specific energetic cost is proportional to stride frequency [2] Robotics?: when decreasing dimensions friction becomes more relevant respect to mass-related forces such as inertial forces [1] D.F.Hoyt, S.J. Wickler, E.A. Cogger, Time of contact and step length: the effect of limb length, running speed, load carrying and incline, J. Exp. Biol., 203, 221–227 (2000) [2] N.C. Heglund, C.R. Taylor, Speed, stride frequency and energy cost per stride: how do they change with body size and gait?, J. Exp. Biol., 138, 301-318, (1988)
Volume related forces and surface forces scales differently, the former proportional to l3 the latter to l2. This influence the bone diameter, the posture and many other gait characteristics, such as maximum exerted force respect to body weight (BW) As both the maximum yield stress and safety factor in bones are about constant for different animals, in small animals supporting and moving the body is not a critical issue. Thus they can easily achieve high relative running speed. This performance would be impossible for an elephant due to structural bone and muscles limitations. Relative running speed [3] [body length s-1] Elephant (Loxodonta Africana) 1.40 Rodent (Dipodomys merriami) 80.31 [3] J.I. Diaz, Different scaling performance in small and large terrestrial mammals, J. Exp. Biol., 205, 2897-2908, (2002)
A force comparable to body weight means small variation in vertical momentum, and thus a short airborne phase. Elephants can reach speeds of 6 m/s, without engaging an airborne phase [4], while rodents difficultly move at low speeds [2]. Gait frequency is triggered by gravity: relatively high vertical forces naturally makes it easier for small animals to jump several body length within one step (man on the moon) [4] S.A. Frank, M.A. Nowak,Are fast-moving elephants really running?, Nature, 422, 493-494, (2003) [5] R.M. Alexander, Principles of animal locomotion, Princeton University Press, (2003)
m l A key factor in considering scale effects on locomotion is the Froude number Fr . The Froude number takes into account the ratio between kinetic and potential energy during the stance phase Fr can be also considered as the ratio between centrifugal and gravitational force acting on a stance leg. Theoretically contact is lost for Fr>1 It is observed that different sized animals switch from walk to run at the same Fr≈0.4 [5],[6]. At the same Fr locomotion in different sized animals is dynamically similar, which means that decreasing dimensions has the same effect as increasing the square of the speed [5] R.M. Alexander, Principles of animal locomotion, Princeton University Press, (2003) [6] C.T. Farley, C.R. Taylor, A mechanical trigger for the trot–gallop transition in horses, Science, 253, 306–308, (1991)
Bio-inspiration Taking into account scale effects, small robots would have a longer airborne phase respect to bigger ones, leading to a jumping gait as a possible efficient solution for locomotion
Jumping vs. hopping • Contact forces >> mg • Long airborne phase • Short contact phase • High peak power at take off • Relevant changes in cmpotential energy
In jumping frogs, peak power output is from 1.5 up to 7 times greater than the maximum muscle power [9]. This is due to the presence of elastic tendons and an inertialclick mechanism. The muscle stretch the tendon that releases the energy stored when the click mechanism is relished. In the robot, this allows to reduce the mass of actuation and power supply. [9] T.J. Roberts, R.L. Marsh, Probing the limits to muscle-powered accelerations: lessons from jumping bullfrogs, J. Exp. Biol., 206, 2567-2580, (2003)
l v h Fc Jumping implies high changes in center-of-mass (CM) potential energy and recovering impact energy when landing is important in order to preserve efficiency For a0=45°potential energy is half the kinetic energy needed for the jump Passive forelegs store and release impact energy in their elastic recoil, and in continuous gait remarkably increase the robot performances. The model that we obtain in this way is similar to the Raibert hopper.
Due to the short contact phase and high contact forces, flight stability can be achieved by using wings or aerial passive appendages. Passive rotation of the wings let them orientate during take off and flight phase Steering can be achieved airborne rotating the wings using a four bar mechanism actuated by a small motor
Fx Fy Fground The concept: a jumping mini robot • Based on these observations, a jumping robot was designed with: • Active rear legs: the thrust for the jump is provided by springs loaded by a tiny motor • Passive forelegs: store and release impact energy in their elastic recoils • Spiny foot: foot-ground contact is ensured during the whole leg extension by a spiny foot • Wings are used to stabilize the gait and let the robot steer
Experimental platform 2. 1. 3. 6. 4. 3. 4. 2. 5. 5. • Magnetic click mechanism • Rear legs actuation springs • DC motor • 3V Battery • Springy forelegs • Eccentric cam
Dimensioning rear legs according to jumping performances: energetic considerations • Kinetic energy needed at take off • Thrust effectiveness: rear feet contact
Dx Rear legs ---- Forelegs t With x=0.4 and xeq=0 x1 should be at least half x2 Dimensioning forelegs to maximize energy recovery: synchronize fore and rear legs elongation Forelegs: torsional and compression springs in series. Consider a corresponding non-linear compression spring of stiffness K’
Gait simulations and robot model Simulations were run with Simulink and Adams on the jumping gait. The mass distribution of the robot was given by the prototype design, while linear springs modeled the legs. Spherical joints were chosen to model the shoulders, constraining the rotations with torsional springs of different stiffness according to the legs and to the plane of rotation
First, the model was modeled with a pitch stabilization, as would be done by wings, in order to focus on the effects of the passive recoil on the jumping gait. After few steps, the jumping height sensibly increases despite the actuation remains the same at every step Stiffness and damping parameters are chosen so that forelegs contraction and rear legs elongation are synchronized to maximize jump thrust
When the robot was modeled as a free body, pitch rotation become critical in determining the succeeding of the jumping sequence. Before introducing an additional actuator, the possibility of a triggered gait was investigated Due to the relatively long airborne phase and high contact forces, the best way to control the body rotation is during the flight phase. This can be achieved using passive wings or through inertial forces
Conclusions • Scientific lesson: jumping is an effective solution for achieving high locomotion speeds within small dimensions • Dedicated design solutions are needed for jumping: • active and passive energy storing by means of elastic structures • Stabilizing structures for the airborne phase • Robotic platforms exploiting and proving the theoretical model can be successfully developed • Possible applications of jumping minirobots include exploration and monitoring in unstructured environments
Future developments • Cam design and fabbrication: mechanism for spring loading • Study of the flight phase: air lift and grad can be studied adopting small wings • Steering capability: force distribution at take off or airborne turning could be explored • Ground contact: study foot-ground interaction