Download
1 / 48
480 likes | 571 Views
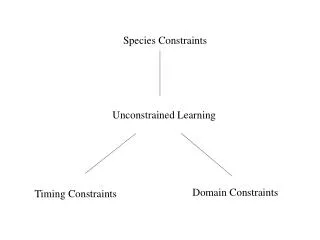
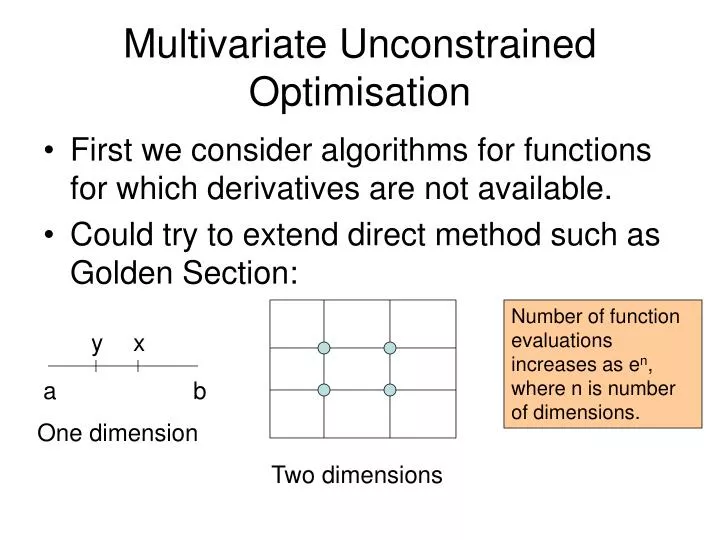
y. x. a. Two dimensions. Multivariate Unconstrained Optimisation. First we consider algorithms for functions for which derivatives are not available. Could try to extend direct method such as Golden Section:. Number of function evaluations increases as e n , where n is number of dimensions.

E N D
y x a Two dimensions Multivariate Unconstrained Optimisation • First we consider algorithms for functions for which derivatives are not available. • Could try to extend direct method such as Golden Section: Number of function evaluations increases as en, where n is number of dimensions. b One dimension
The Polytope Algorithm • This is a direct search method. • Also known as “simplex” method. • In n dimensional case, at each stage we have n+1 points x1, x2,…,xn+1 such that: F(x1) F(x2) F(xn+1) • The algorithm seeks to replace the worst point, xn+1, with a better one. • The xi lie at the vertices of an n-dimensional polytope.
The Polytope Algorithm 2 • The new point is formed by reflecting the worst point through the centroid of the best n vertices: • Mathematically the new point can be written: xr = c + (c-xn+1) where >0 is the reflection coefficient. • In two dimensions polytope is a triangle; in three dimensions it is a tetrahedron.
x1 (c-x3) c-x3 c xr x3 (worst point) x2 Polytope Example • For n = 2 we have three points at each step.
Detailed Polytope Algorithm • Evaluate F(xr)Fr. If F1 Fr Fn, then xr replaces xn+1. • If Fr< F1 then xr is new best point and we assume direction of reflection is “good” and attempt to expand polytope in that direction by defining the point, xe = c + (xr-c) where >1. If Fe< Fr then xe replaces xn+1; otherwise xr replaces xn+1.
Detailed Polytope Algorithm 2 • If Fr> Fn then the polytope is too big and we attempt to contract it by defining: xc = c + (xn+1-c) if Fr Fn+1 xc = c + (xr-c) if Fr < Fn+1 where 0<<1. If Fc< min(Fr,Fn+1) then xc replaces xn+1; otherwise a further contraction is done.
MATLAB Example Polytope >> banana = @(x)10*(x(2)-x(1)^2)^2+(1-x(1))^2; >> [x,fval] = fminsearch(banana,[-1.2, 1],optimset('Display','iter'))
Polytope Example • Start with equilateral triangle: x1 = (0,0) x2=(0,0.5) x3=(3,1)/4 • Take =1, =1.5, and =0.5
Polytope Example: Step 1 • Polytope is • Worst point is x1, c = (x2+ x3)/2 = (0.2165,0.375) • Relabel points: x3 x1, x1 x3 • xr = c + (c- x3) = (0.433,0.75) and F(xr)=3.6774 • F(xr)< F(x1) so xr is best point so try to expand. • xe = c + (xr-c) = (0.5413,0.9375) and F(xe)=3.1086 • F(xe)< F(xr) so accept expand
Polytope Example: Step 2 • Polytope is • Worst point is x2, c = (x1+ x3)/2 = (0.4871,0.5938) • Relabel points: x3 x1, x2 x3, x1 x2 • xr = c + (c- x3) = (0.9743,0.6875) and F(xr)=2.0093 • F(xr)< F(x1) so xr is best point so try to expand. • xe = c + (xr-c) = (1.2179,0.7344) and F(xe)=2.2837 • F(xe)>F(xr) so reject expand.
Polytope Example: Step 3 • Polytope is • Worst point is x2, c = (x1+ x3)/2 = (0.7578,0.8125) • Relabel points: x3 x1, x2 x3, x1 x2 • xr = c + (c- x3) = (1.0826,1.375) and F(xr)=3.1199 • F(xr)>F(x2) so polytope is too big. Need to contract. • xc = c + (xr-c) = (0.9202,1.0938) and F(xc)=2.2476 • F(xc)<F(xr) so accept contraction.
Polytope Example: Step 4 • Polytope is • Worst point is x2, c = (x1+ x3)/2 = (0.9472,0.8906) • Relabel points: x3 x2, x2 x3 • xr = c + (c-x3) = (1.3532,0.8438) and F(xr)=2.7671 • F(xr)>F(x2) so polytope is too big. Need to contract. • xc = c + (xr-c) = (1.1502,0.8672) and F(xc)=2.1391 • F(xc)<F(xr) so accept contraction.
Polytope Example: Step 5 • Polytope is • Worst point is x2, c = (x1+ x3)/2 = (1.0622,0.7773) • Relabel points: x3 x2, x2 x3 • xr = c + (c- x3) = (1.2043,0.4609) and F(xr)=2.6042 • F(xr)F(x3) so polytope is too big. Need to contract. • xc = c + (x3-c) = (0.9912,0.9355) and F(xc)=2.0143 • F(xc)<F(xr) so accept contraction.
Polytope Example: Step 6 • Polytope is • Worst point is x2, c = (x1+ x3)/2 = (0.9827,0.8117) • Relabel points: x3 x2, x2 x3 • xr = c + (c- x3) = (0.8153,0.7559) and F(xr)=2.1314 • F(xr)>F(x2) so polytope is too big. Need to contract. • xc = c + (xr-c) = (0.8990,0.7837) and F(xc)=2.0012 • F(xc)<F(xr) so accept contraction.
Polytope Example: Final Result • So after 6 steps the best estimate of the minimum is x = (0.8990,0.7837) for which F(x)=2.0012.
Alternating Variables Method • Start from point x = (a1, a2,…, an). • Take first variable x1, and minimise F(x1, a2,…, an) with respect to x1. This gives x1= a1. • Take second variable x2, and minimise F(a1, x2,…, an) with respect to x2. This gives x2= a2. • Continue with each variable in turn until minimum is reached.
AVM in Two Dimensions • Method of minimisation over each variable can be any univariate method. Start
AVM Example in 2D • Minimise F(x,y)=x2+y2+xy-2x-4y • Start at (0,0).
Definition of Gradient Vector • The gradient vector is: • The gradient vector is also written as F(x).
Definition of Hessian Matrix • The Hessian matrix is defined as: • The Hessian matrix is symmetric, and is also written as 2F(x).
Conditions for a Minimum of a Multivariate Function • |g(x*)| = 0. That is, all partial derivatives are zero. • G(x*) is positive definite. That is, xTG(x*)x > 0 for all vectors x0. • The second condition implies that the eigenvalues of G(x*) are strictly positive.
Stationary Points • If g(x*)=0 then x* is said to be a stationary point. • There are 3 types of stationary point: • Minimum, e.g., x2+y2 at (0,0) • Maximum, e.g., 1-x2-y2 at (0,0) • Saddle Point, e.g., x2-y2 at (0,0)
Definition: Level Surface • F(x)=constant defines a “level surface”. • For different values of the constant we generate different level surfaces. • For example, in 3-D suppose F(x,y,z) = x2/4 + y2/9 + z2/4 • F(x,y,z) = constant is an ellipsoid surface centred on the origin. • Thus, the level surfaces are a series of concentric ellipsoidal surfaces. • The gradient vector at point x is normal to the level surface passing through x.
Definition: Tangent Hyperplane • For a differentiable multivariate function, F, the tangent hyperplane at the point xt on the surface F(x)=constant is normal to the gradient vector.
Definition: Quadratic Function • If the Hessian matrix of F is constant then F is said to be a quadratic function. • In this case F can be expressed as: F(x) = (1/2)xTGx + cTx + for a constant matrix G, vector c, and scalar . • F(x) = Gx + c and 2F(x) = G.
Example Quadratic Function • F(x,y) = x2 + 2y2 + xy – x + 2y • Gradient vector is zero at stationary point, so Gx + c = 0 at stationary point • Need to solve Gx = -c to find stationary point: x* = G-1c x* = (6/7 -5/7)T
Hessian Matrix Again • We can predict the behaviour of a general nonlinear function near a stationary point, x*, by looking at the eigenvalues of the Hessian matrix. • Let uj and j denote the jth eigenvector and eigenvalue of G. • If j > 0 the function will increase as we move away from x* in direction uj. • If j < 0 the function will decrease as we move away from x* in direction uj. • If j = 0 the function will stay constant as we move away from x* in direction uj.
Example Again • 1 = 1.5858 and 2 = 4.4142, so F increases as we move away from the stationary point at (6/7 -5/7)T. • So the stationary point is a minimum.
Example in 4D • In MATLAB: >> c = [-1 2 3 4]’; >>G = [2 1 0 2; 1 2 -1 3; 0 -1 4 1; 2 3 1 -2]; >>x = G\(-c) >>[u,lambda] = eigs(G)
Descent Methods • Seek a general algorithm for unconstrained minimisation of a smooth multivariate function. • Require that F decreases at each iteration. • A method that imposes this type of condition is called a descent method.
A General Descent Algorithm Let xk be current iterate. • If converged then quit; xk is estimate of minimum. • Compute a nonzero vector pk giving direction of search. • Compute a positive scalar step length, k for which F(xk+ k pk) < F(xk). • New estimate of minimum is xk+1 = xk+ kpk. Increment k by 1, and go to step 1.
Method of Steepest Descent • Direction in which F decreases most steeply is -F, so we use this as the search direction. • New iterate is xk+1 = xk - kF, where k is non-negative scalar chosen so that xk+1 is the minimum point along the line from xk in the direction -F. • Thus, k minimises F(xk - F) with respect to .
Steepest Descent Algorithm • Initialise: x0, k=0 • Loop: u = F(xk) if |u|=0 then quit else minimise h()=F(xk- u) to get k xk+1 = xk- ku k = k+1 if (not finished) go to Loop
Example • F(x,y) = x3 + y3 - 2x2 + 3y2 - 8 • F(x,y) = 0 gives 3x2-4x=0 so x = 0 or 4/3; and, 3y2+6y=0 so y=0 or -2.
Solve with Steepest Descent • Take x0 = (1 -1)T, then F(x0)=(-1 -3)T. • h()F(x0- F(x0)) = F(1+,-1+3) = (1+)3+(3-1)3-2(1+)2+3(3-1)2-8 • Minimise h() with respect to . h/ = 3(1+)2+9(3-1)2-4(1+)+18(3-1) = 842 + 2 -10 = 0 • So = 1/3 or -5/14. must be nonnegative so = 1/3.
Solve with Steepest Descent • x1 = x0 - F(x0) = (1 -1)T – (-1/3 -1)T = (4/3 0)T. • This is the exact minimum. • We were lucky that the search direction at x0 points directly towards (4/3 0)T. • Usually we would need to do more than one iteration to get a good solution.
Newton’s Method • Approximate F locally by a quadratic function and minimise this exactly. • Taylor’s Theorem: F(x) F(xk)+(g(xk))T(x-xk)+ (1/2)(x-xk)TG(xk)(x-xk) = F(xk)-(g(xk))Txk+ (1/2)xkTG(xk)xk+ (g(xk)-G(xk)xk)Tx+(1/2)xTG(xk)x • RHS is minimum when g(xk) – G(xk)xk+G(xk)xk+1=0 • So xk+1= xk – [G(xk)]-1g(xk) Search direction is -[G(xk)]-1g(xk) and step length is 1.
Newton’s Method Example • Rosenbrock’s function: F(x,y) = 10(y-x2)2 + (1-x)2 • Use Newton’s Method starting at (-1.2 1)T.
MATLAB Solution >> F=@(x,y)10*(y-x^2)^2+(1-x)^2 >>fgrad1=@(x,y)-40*x*(y-x^2)-2*(1-x) >>fgrad2=@(x,y)20*(y-x^2) >>G11=@(x,y)120*x^2-40*y+2 >>x=[-1.2;1] >>x=x-inv([G11(x(1),x(2)) -40*x(1);-40*x(1) 20])*[fgrad1(x(1),x(2)) fgrad2(x(1),x(2))]’
Notes on Newton’s Method • Newton’s Method converges quadratically if the quadratic model is a good fit to the objective function. • Problems arise if the quadratic model is not a good fit outside a small neighbourhood of the current point.