Download
1 / 21
260 likes | 627 Views
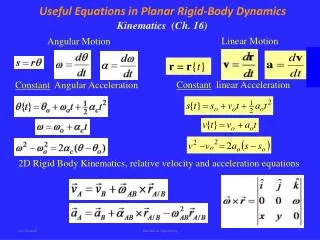
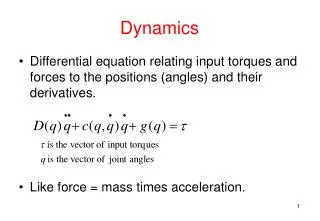
Rigid Body Dynamics (unconstrained). Simulation Basics. State vector of a single particle. Change of Y(t) over time. Solved by any ODE solver (Euler, Runge-Kutta, etc.). Body space Origin: center of mass p 0 : an arbitrary point on the rigid body, in body space.

E N D
Simulation Basics State vector of a single particle Change of Y(t) over time Solved by any ODE solver (Euler, Runge-Kutta, etc.)
Body space Origin: center of mass p0: an arbitrary point on the rigid body, in body space. Its world space location p(t) Spatial variables of the rigid body: 3-by-3 rotation matrix R(t) and x(t) Rigid Body Concepts
Three columns of R(t) correspond to the axes of the body-space in the world space The Rotation Matrix
How are R(t) and w(t) related? Linear and Angular Velocity
Single particle Linear Momemtum
Uniform Force Field No effect on the angular momentum
The Football in Flight (ref) Gravity does not exert torque Angular momentum stays the same
Using Quaternion quaternion multiplication Unit quaternion as rotation quaternion derivative Equation of motion