Download
1 / 48
480 likes | 608 Views
Airframe Measurements. P09233 – Detailed Design Review. Team Structure. Team Lead: Michael Skube – Mechanical Engineer Co-Team Lead: J ames H unt – Mechanical Engineer Electrical Lead: Joseph Peters – Electrical Engineer Kevin Li – Electrical Engineer

E N D
Airframe Measurements P09233 – Detailed Design Review
Team Structure • Team Lead: Michael Skube – Mechanical Engineer • Co-Team Lead: James Hunt – Mechanical Engineer • Electrical Lead: Joseph Peters – Electrical Engineer • Kevin Li – Electrical Engineer • William Atkinson – Mechanical Engineer • Heidi Morgan – Electrical Engineer • John Isely– Mechanical Engineer
Power – Input Voltages *LM1117 – Linear Regulator
Power – Calculation • Total Power Consumption: : .439 W – .697 W • Airframe A Battery: • 14.4 V • 2.5 Ampere-hour • 36 W-hour • Can supply power for 52 – 82 continuous hours • ~100x our expected flight time (40 minutes)
GPS • Variable update rate • 1-5 Hz • 32 Parallel Channels • High Accuracy • ~3.3m • Small Size • 30x30x8.5mm • Software: • GPS Locator Utility
GPS – Accuracy Test • Observations • Number of Satellites: • Max: 13 • Min: 9 • Avg: 10 • Percentage of available satellites used: ~83% • Altitude (example from starting point) • Google Earth: 524ft • GPS: 517ft • ~1% error
GPS – Accuracy Test Speed (MPH) Sample Number Stop Signs
GPS – Accuracy Test Red Barn Altitude (m) Sample Number
GPS –Test Plan • Test #1: Accuracy Test • Test #2: Time Satellite Fix • Test #3: Material Interference • Test #4: Orientation effects
Microcontroller • Atmel: AT91SAM7S • Various I/O • 2x UART • 10 bit ADC • SPI • SD Card
IMU • Analog Devices: ADIS16350 • 6 degrees of freedom • Tri-axis accelerometer • X, Y and Z linear acceleration • Tri-axis gyroscope • X, Y and Z angular acceleration • Serial Peripheral Interface (SPI) • master (MCU) –slave (IMU)
IMU – Output Registers Adapted from ADIS16350 Datasheet
IMU – Timing Diagram Adapted from ADIS16350 Datasheet
SPI Communication: IMU • Example code: x-axis gyro • Chip Select is driven low • Address written to DIN to determine what register is read • Data is read off by MCU
UART Communication: GPS • UART (parallel to serial) controlled • Interrupt to inform MCU new data is available • Prevents the processor from being bogged down
ADC Communication: Initialization • Measure analog voltages and assign digital values to store. • 10 bit ADC • 1024 digital measurements possible
Measurements Box Design • The design space inside Airframe A required that the MCU be cut down, the change in size is shown below full size board cut down board
Measurements Box Design GPS IMU Altimeter Microcontroller Ultrasonic
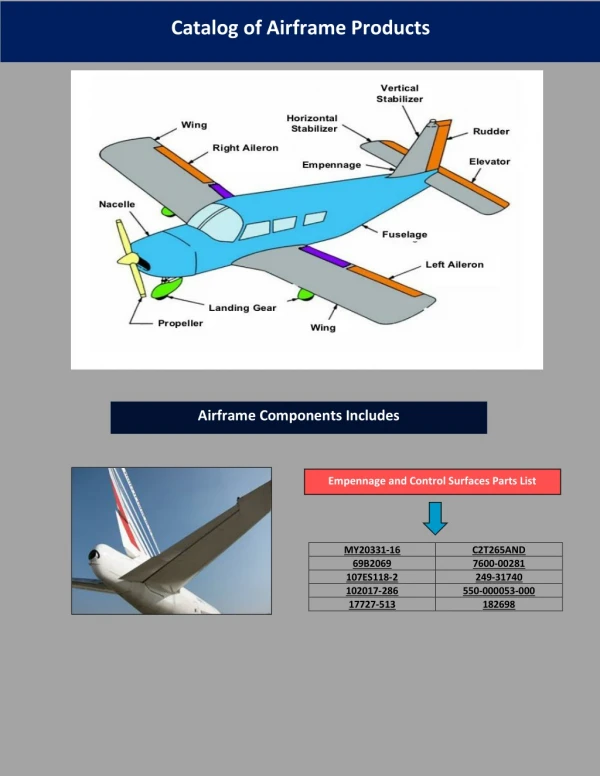
Component Constraints & Dimensions • IMU Requires Specific Mounting Direction • Ultrasonic Sensor Mounting on the Exterior • Altimeter Requires Static Pressure Inside = Static Pressure Outside • GPS Requires Specific Mounting Direction • GPS Requires No Dense Obstructions • Pitot Static Tube Mounting Outside of Boundary Layer • Pitot Static Tube Sensor Must be Easy to Remove
Pitot Static Tube Analysis • The Pitot Static tube works off of two very simple principles, Bernoulli and the Ideal Gas Equation Bernoulli Equation Ideal Gas Equation From this, the speed of the aircraft through the air can be found directly.
Pitot Static Tube Testing • Test #1 – Wind Tunnel Testing in RIT Wind Tunnel • Test #2 – Car Test with Anemometer • Test #3 – Time Delay Test on tubing • Test #4 – Flight in Airframe A • Test #5 – Compare Velocity with GPS Velocity
Pitot Tube Test Results • Test #1 – Small Wind Tunnel at RIT Spec from ETS states lower limit of 2 mph
Pitot Tube Test Results (cont.) • Test #3 – Time Delay Theory This is based off Pneumatics with a Capacitance and a Resistance Then a system model can be setup with a step input to find the time delay to the sensor.
Pitot Tube Test Results (cont.) • Test #3 – Time Delay Theory R = 1.322e-6 m*s C = 9.332e-7 m*s^2
Altimeter cont… • Future tests • Vacuum Chamber • Use a vacuum chamber to simulate the pressure drop of high altitude ~10,000 ft • Altimeter vs GPS • Compare the GPS and Altimeters readings
Vibration Dampening • Vibration Damping helps to reduce vibrations and shocks to sensors and components • Softness Ratings for our Application • 5 - 9 for Foams • 35 - 75 for Rubbers • Good or Excellent compression recovery was also selected as it will allow the dampener to have quick energy dissipation. • Sensors and the MCU will use Vibration Foam Sheets • The Boxes Mounting Bolts will use Vibration Grommets
Vibration Dampening Images from McMaster.com
Projected Project Costs • Building a second Measurements Box: • Total Project Cost: $1900(includes IMU cost ~$500) • Total Project Cost: $1400 (assumes donated IMU) • Measurements Box BOM: • $1100(includes IMU cost ~$500) • $600(assumes donated IMU) • The Current Project Cost: $910
Current Risks • Ability to Program the MCU • Ability to Interface with the IMU • Ability to Test the IMU – MAV Test Stand • GPS Calibration • Airframe A Flight Testing
Action Items • Program MCU • IMU Testing • Further Sensor Testing • Pitot Static Tube Mounting Design • Part Drawings • Assembly Instructions • Component Documentation
Schedule - SDII Part Design Test Pitot Static Tube Program MCU Phase I System Testing Test Altimeter Document BOX Build
Schedule - SDII Drawings Documentation Refine Programming Phase II System Testing Final Documentation Documentation