Download

1 / 11
110 likes | 231 Views
La Robo Copa es una iniciativa internacional para promover los avances en Inteligencia Artificial y Robótica, proveyendo un problema estándar para realizar investigación: el fútbol soccer.

E N D
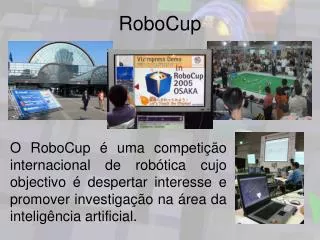
La Robo Copa es una iniciativa internacional para promover los avances en Inteligencia Artificial y Robótica, proveyendo un problema estándar para realizar investigación: el fútbol soccer.
El objetivo principal es lograr que un grupo de robots sea capaz de jugar al fútbol en forma autónoma, inteligente y coordinada se requiere desarrollar e integrar una amplia gama de técnicas y algoritmos de Inteligencia Artificial.
El objetivo final de esta iniciativa es desarrollar un equipo de robots humanoides totalmente autónomos que puedan ganar al equipo de seres humanos campeón de fútbol soccer para el año 2050. Este objetivo quizá suene muy ambicioso e irrealista hoy en día, pero la idea es precisamente que este objetivo sirva para alentar y acelerar la educación, investigación y tecnologías en Inteligencia Artificial y Robótica.
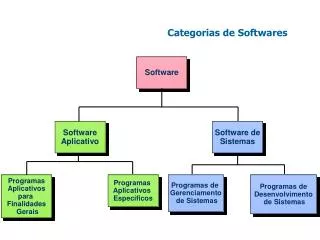
Categorias de la Robocup Los partidos en la Robo Copa ofrecen buenas oportunidades para probar y experimentar nuevas técnicas y/o algoritmos de Inteligencia Artificial. Existen diferentes ligas en la Robo Copa dependiendo de las características de los robots o agentes de software y los partidos a jugar:
Liga de Simulación En esta liga dos equipos de 11 agentes de software juegan fútbol en un campo virtual dentro de una computadora. Esta liga inició desde el primer año de la Robo Copa en 1997 con agentes en un mundo virtual en 2D (dos dimensiones), hace algunos años se empezó a competir con un mundo virtual en 3D (tres dimensiones) donde los agentes eran esferas y últimamente se introdujeron agentes humanoides de software en tres dimensiones.
Liga de Robots Pequeños (f-180) En esta liga juegan equipo de 5 robots de no más de 18 cm. de diámetro en una cancha un poco más grande que una mesa de ping-pong. El control de los robots es un sistema híbrido centralizado/distribuido utilizando una cámara de video aérea central. Los partidos son en tiempos de 10 minutos. Liga de Robots Medianos (f-2000) En esta liga juegan equipos de 4 robots con un balón de fútbol en un campo de 12x8 metros. El control de los robots es totalmente distribuido, todos los sensores de los robots deben ir a bordo y pueden utilizar comunicación inalámbrica. Los partidos se dividen en tiempos de 15 minutos.
Loga de Robots en 4 patas (Aibo) En esta liga juegan equipos de 4 robots AIBO (unos perritos robóticos fabricados por Sony) en una cancha de 3x5 metros. Los robots también usan red inalámbrica para comunicarse. Los partidos se dividen en tiempos de 10 minutos. Está liga es ahora sólo de exhibición y fue reemplazada por la liga de plataforma estándar.
Liga Humanoides La liga de humanoides es una de las ligas que mas ha progresado y la mas cercana hacia el objetivo del 2050 de RoboCup. En esta liga, robots autónomos con un cuerpo similar al humano así como percepciones similares a las humanas, juegan futbol entre ellos. Los robots son divididos en dos categorías de tamaño: "KidSize" (30-60 cm de alto) y "TeenSize" (100-160 cm de alto). El caminar, correr, patear el balón mientras se mantiene el equilibrio, percepción visual de la pelota, otros jugadores y el campo, auto-localización, juego de equipo son algunos de los muchos problemas abordados en esta liga.
Liga de Plataforma Estándar (Nao) En esta liga todos los equipos utilizan robots idénticos (Nao robot). Por tal motivo los equipos se concentran únicamnete en el desarrollo del programa controlador del robot. Estos robots son capaces de actuar autonomamente sin necesidad de ningún control externo.
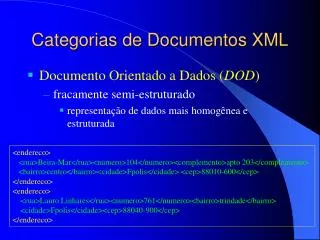
Robocup 2D Simulation League La liga de simulación en 2D es una de las pocas ligas dentro de Robocup en las cuales no es necesario ningún tipo robot físico. La idea principal de esta liga es poder utilizarla como escenario inicial de técnicas que posteriormente puedan ser implementadas en los robots físicos reales de cualquier tipo de liga. Sin embargo esta liga esta cediendo todo su lugar a la liga de 3D. Ya que, no hace falta decirlo, es mucho más interesante y realista trabajar en un ambiente de tres dimensiones que en uno de dos.