Download
1 / 1
10 likes | 88 Views
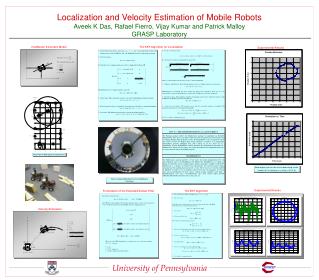
This study presents the ClodBuster Kinematic Model and the EKF Algorithm for localization and velocity estimation. Experimental results and floor plan of workspace are discussed, along with actual outputs from the filter as the robot moves in a circle. Orange landmarks and the Extended Kalman Filter formulation are also highlighted.

E N D
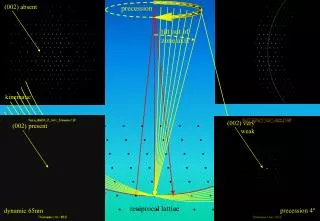
Y (meters) P8 (1,9) P7 (2.5,9) P6 (4,9) 9 Y Y 8 P9 (0,7.5) q(k+1) P5 (5,7.5) 7 CB1 q(k) q1 P10 (0,6) f (xk,yk) 6 P4 (5,6) q1 = (x1, y1, q1) l q y 5 r 4 CB2 P11 (0,4) 0.127 m X x b 3 P3 (5,3) d X P12 (0,2.5) 2 P2 (5,2) q2 = (x2, y2, q2) Ben S. P1 (3.5,1) 1 0 X (meters) 0 1 2 3 4 5 R3 Localization and Velocity Estimation of Mobile RobotsAveek K Das, Rafael Fierro, Vijay Kumar and Patrick MalloyGRASP Laboratory ClodBuster Kinematic Model The EKF Algorithm for Localization Experimental Results Floor Plan of Workspace for Experiments Actual outputs from the filter for the robot making a circle of radius 0.7 m starting at (x, y, theta) = (2.5, 2, 0) View of orange landmarks from the ClodBuster’s OmniCam Experimental Results Formulation of the Extended Kaman Filter The EKF Algorithm Velocity Estimation