Download
1 / 23
230 likes | 338 Views
Simplification of Articulated Mesh. Present by Guilin Liu. Motivation. Explosion of digital 3D models 1. reverse engineering: laser scanning 2. interactive software …. Problem: large scale Digital Michelangelo project: 1 billion polygons Real-time application

E N D
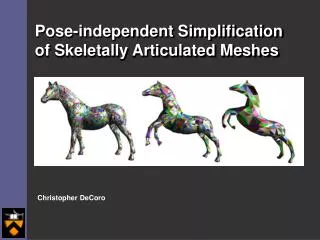
Simplification of Articulated Mesh Present by Guilin Liu
Motivation • Explosion of digital 3D models 1. reverse engineering: laser scanning 2. interactive software …. • Problem: large scale • Digital Michelangelo project: 1 billion polygons • Real-time application real-time rendering, real-time interaction…
Simplification • Standard simplification • Assuming single, static shape
Simplification • Simplification trade-off
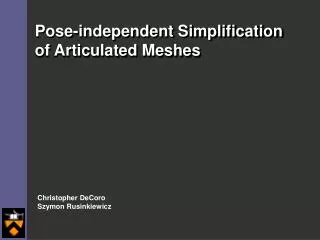
Simplification • Simplification associated with deformation
Company Logo Simplification of Articulated Meshes • Input • Mesh models • Example poses • Output • Multi-resolution hierarchy: • Simplified vertices and their skin weights • Method • Minimize an error metric using quartic optimization method
Previous work: static mesh • 1. Vertex decimation[SZL92]
Previous work: static mesh • 2. Vertex clustering method RB[93] • Cluster generation • Compute a representation • Mesh generation • Topology changes
Previous work: static mesh 3. edge collapse[Hop96, GH97]
Previous work: deformable • 1. break-simplify-stitch[SF99] • Break into bones • Simplify bones individually • Stitch together
Previous work: deformable • 2. static simplification-reinterpret[HP01] • Do simplification on static model • Reinterpret the simplification on deformable models
Previous work: deformable • 3. Bagging method[MG03] • Compute simplification for all poses • Sum QEF error of all vertices for each pose • Use the QEF of vertices to govern the order of edge collapses
Previous work: deformable • 4.improve method #3[DR05] • Improve by locally rotating the QEF using bone transformation and adding the QEF together • Allow QEF to position simplified vertices
Previous work: deformable • 5.build multi-resolution hierarchy and search a closest simplification [SPB01,SP01] • Build multiply simplifications • For each pose of deformation, find a closest simplification that has best qualify for that pose
Method • Input: • one or more poses of the skeleton • Use edge collapses methods • Modify the quadratic error function
Method • Error function
Method • Minimize error function • Not quadratic, but quartic with α and v • Approach: split into two steps • Fix α, find optimal v --- quadratic!!! • Fix v, find optimal α ----quadratic!!!
Method • Fix α, find optimal v • due to insufficient pose sampling or small number of bones. Lead to invertible matrix
Limitation & Discussion • The performance depends on how well the pose samplings are. • The skin weights comes from optimization solution. • Didn’t utilize the original skin weights information. • The skin weight and approximation position may influence each other. • Error accumulation