Download
1 / 1
10 likes | 139 Views
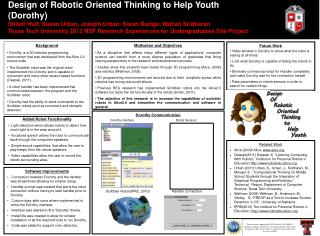
Creating a Stimulating 3D Programing Environment by Integrating Complex Robot Types Sabyne Peeler, Florida A & M University Sarah Rainge , Shiqi Zhang, Mohan Sridharan , Susan Urban, Joseph Urban. Approach Overview

E N D
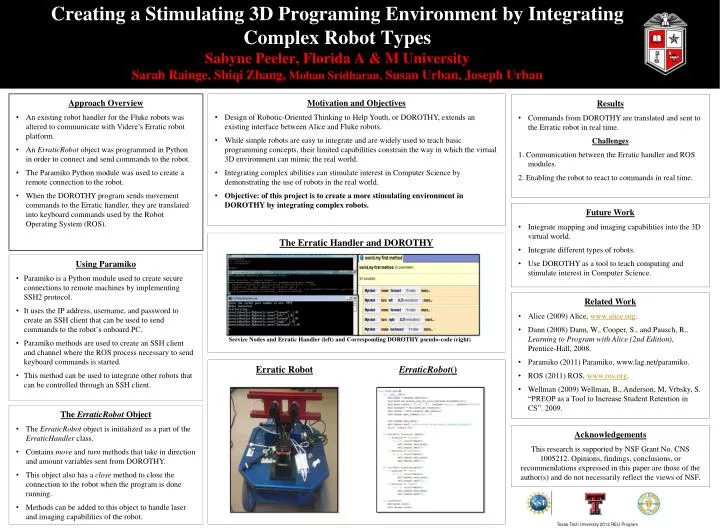
Creating a Stimulating 3D Programing Environment by Integrating Complex Robot TypesSabyne Peeler, Florida A & M UniversitySarah Rainge, Shiqi Zhang, Mohan Sridharan, Susan Urban, Joseph Urban • Approach Overview • An existing robot handler for the Fluke robots was altered to communicate with Videre’s Erratic robot platform. • An ErraticRobot object was programmed in Python in order to connect and send commands to the robot. • The Paramiko Python module was used to create a remote connection to the robot. • When the DOROTHY program sends movement commands to the Erratic handler, they are translated into keyboard commands used by the Robot Operating System (ROS). • Motivation and Objectives • Design of Robotic-Oriented Thinking to Help Youth, or DOROTHY, extends an existing interface between Alice and Fluke robots. • While simple robots are easy to integrate and are widely used to teach basic programming concepts, their limited capabilities constrain the way in which the virtual 3D environment can mimic the real world. • Integrating complex abilities can stimulate interest in Computer Science by demonstrating the use of robots in the real world. • Objective: of this project is to create a more stimulating environment in DOROTHY by integrating complex robots. • Results • Commands from DOROTHY are translated and sent to the Erratic robot in real time. • Challenges • 1. Communication between the Erratic handler and ROS modules. • 2. Enabling the robot to react to commands in real time. • Using Paramiko • Paramiko is a Python module used to create secure connections to remote machines by implementing SSH2 protocol. • It uses the IP address, username, and password to create an SSH client that can be used to send commands to the robot’s onboard PC. • Paramiko methods are used to create an SSH client and channel where the ROS process necessary to send keyboard commands is started. • This method can be used to integrate other robots that can be controlled through an SSH client. • Future Work • Integrate mapping and imaging capabilities into the 3D virtual world. • Integrate different types of robots. • Use DOROTHY as a tool to teach computing and stimulate interest in Computer Science. • The Erratic Handler and DOROTHY • Related Work • Alice (2009) Alice, www.alice.org. • Dann (2008) Dann, W., Cooper, S., and Pausch, R.. Learning to Program with Alice (2nd Edition), Prentice-Hall, 2008. • Paramiko (2011) Paramiko, www.lag.net/paramiko. • ROS (2011) ROS, www.ros.org. • Wellman (2009) Wellman, B., Anderson, M, Vrbsky, S. “PREOP as a Tool to Increase Student Retention in CS”. 2009. Service Nodes and Erratic Handler (left) and Corresponding DOROTHY pseudo-code (right) Erratic RobotErraticRobot() • The ErraticRobot Object • The ErraticRobot object is initialized as a part of the ErraticHandler class. • Contains move and turn methods that take in direction and amount variables sent from DOROTHY. • This object also has a close method to close the connection to the robot when the program is done running. • Methods can be added to this object to handle laser and imaging capabilities of the robot. Acknowledgements This research is supported by NSF Grant No. CNS 1005212. Opinions, findings, conclusions, or recommendations expressed in this paper are those of the author(s) and do not necessarily reflect the views of NSF. Texas Tech University 2012 REU Program