Download

1 / 63
630 likes | 865 Views
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ. WEKTOROWE MODELE DANYCH. PLAN WYKŁADU METODY ZAPISU ODWZOROWAŃ KARTOGRAFICZNYCH ZAPIS ODWZOROWANIA KARTOGRAFICZNEGO PLIKÓW SHP MODELE WEKTOROWE PROSTE MODELE WEKTOROWE ZŁOŻONE – MODEL TOPOLOGICZNY TRIANGULACJA DELAUNEYA – CZ.I STRUKTURA DANYCH DCEL

E N D
GIS – SYSTEMY INFORMACJI GEOGRAFICZNEJ WEKTOROWE MODELE DANYCH
PLAN WYKŁADU • METODY ZAPISU ODWZOROWAŃ KARTOGRAFICZNYCH • ZAPIS ODWZOROWANIA KARTOGRAFICZNEGO PLIKÓW SHP • MODELE WEKTOROWE PROSTE • MODELE WEKTOROWE ZŁOŻONE – MODEL TOPOLOGICZNY • TRIANGULACJA DELAUNEYA – CZ.I • STRUKTURA DANYCH DCEL • DEFNICJE POLIGONU, WIELŚCIANU, D-KOMÓRKI
DEFINIOWANIE UKŁADU WSPÓŁRZĘDNYCH • w przypadku współrzędnych geograficznych (φ, λ): • elipsoida (elipsoid) • położenie elipsoidy w przestrzeni (datum) • B) w przypadku współrzędnych płaskich dodatkowo: • odwzorowanie kartograficzne (mapprojection) • parametry odwzorowania zależą od typu odwzorowania • np. dla odwzorowania Gaussa-Krügera lub poprzecznego odwzorowania Mercatora(Transverse Mercator) są to: • południk środkowy, • współczynnik skalujący na południku osiowym, • przesunięcie w kierunkach wschodnim i północnym
FORMAT DANYCH PLIKU ODWZOROWANIA DLA PLIKÓW SHAPE (.PRJ) • Informacja opisująca zastosowane odwzorowanie dla danych zapisanych w formacie shape jest niezbędna dla prawidlowego ich odczytu i dalszego ich wykorzystania. Plik .prj nie jest plikiem wymaganym, jednak bardzo często stosowanym, gdyż najczęściej nie jest możliwe wywnioskowanie jedynie z samych danych, jakie odwzorowanie kartograficzne zostało zastosowane. Plik .prj najczęściej zawiera następujące informacje: • Geographic coordinate system • Datum (geodesy) • Spheroid • Prime meridian • Map projection • Units used • Parametry odwzorowania kartograficznego: • Latitude of origin • Scale factor • Central meridian • False northing • False easting • Standard parallels
DANE WEKTOROWE • Dane przestrzenne zostają przedstawione (reprezentowane) w formie współrzędnych x, y, (z). Podstawowymi jednostkami informacji przestrzennej są punkty, linie i poligony. Wszystkie obiekty wektorowe składają się z ciągu jednego lub ich większej liczby punktów z określonymi współrzędnymi, dla obiektów liniowych jest to uporządkowany zbiór powiązanych punktów, a dla poligonu zbiór powiązanych linii. • Przykłady danych wektorowych: • TIGER (Topologically Integrated Encoding andReferencing), • ArcView Shapefile, • ArcInfocoverage, • DLG, • CAD format
POŁOŻENIE POSZCZEGÓLNYCH PUNKTÓW WARSTW LINIOWYCH I POLIGONOWYCH W UKŁADZIE WSPÓŁRZĘDNYCH
DEFINICJA MODELU WEKTOROWEGO Model wektorowy: Dla większości obiektów świata rzeczywistego występujących w systemach informacji przestrzennej ich reprezentacja przestrzenna może być zrealizowana tylko jednym z wymienionych elementów geometrycznych. Obiekty tak reprezentowane określa się jako: Punkt - uporządkowana pary współrzędnych w układzie kartezjańskim: (x,y). Linia - ciągi współrzędnych punktów tworzących linię. Wielobok - ciągi współrzędnych punktów tworzących linie ograniczające wielobok. Każdy obiekt (punkt, linia, wielobok) ma swój identyfikator.
REPREZENTACJA OBIEKTÓW W MODELU WEKTOROWYM Poszczególne obiekty proste reprezentują: − obiekty punktowe, reprezentują np. punkty osnowy geodezyjnej, − obiekty liniowe, reprezentują np. ogrodzenia, krawężniki, − obiekty powierzchniowe, reprezentują np. działki.
NUMERYCZNE MODELE PRZESTRZENNE Zależnie od wymiaru podstawowego elementu geometrycznego z jakiego tworzony jest model możemy wyróżnić trzy rodzaje numerycznych modeli przestrzennych: • modele punktowe - podstawowym elementem geometrycznym jest punkt, • modele liniowe (wektorowe) - podstawowym elementem jest linia reprezentowana przez ciąg punktów, • modele powierzchniowe - podstawowym elementem jest obszar, które dodatkowo, w zależności od rozmieszczenia i kształtu podstawowych elementów, dzielone są na: • modele regularne, • modele nieregularne.
MODELE POWIERZCHNIOWE Szczególnymi przypadkami modeli powierzchniowych są teselacje, które definiowane są jako podział części płaszczyzny na elementarne obszary będące figurami ustalonego kształtu. Teselecja w przestrzeni dwuwymiarowej może być więc porównana do mozaiki, której elementy pokrywają całkowicie dany obszar, nie nakładając się na siebie. W teselacjach wyróżniamy teselacje regularne, które utworzone są z elementów w kształcie kwadratu, trójkąta równobocznego lub sześciokąta foremnego Z powyższych modeli największe znaczenie mają modele wektorowe nieregularne oraz modele rastrowe (czyli teselacje o elementach kwadratowych).
PROSTY MODEL WEKTOROWY Model ten stanowi bezpośrednie, numeryczne przedstawienie obiektów świata rzeczywistego przez odpowiadające im geometryczne obiekty w modelu danych przestrzennych. Obiektami prostego modelu wektorowego są obiekty: punktowe, liniowe, powierzchniowe. Położenie obiektów punktowych określa się przez współrzędne punktu lokalizującego dany obiekt. W przypadku obiektów liniowych i powierzchniowych, które określane są przez większą liczbę punktów oprócz ich współrzędnych istotne jest ich odpowiednie uporządkowanie, które określa kształt obiektu. Mając bowiem, jedynie grupę punktów bez informacji o ich uporządkowaniu nie jesteśmy w stanie jednoznacznie określić kształtu obiektu.
PROSTY MODEL WEKTOROWY SPAGHETTI • W prostym modelu wektorowym „spaghetti” brak jest informacji o bezpośredniej wzajemnej relacji opisywanych danych. W ten sposób: • poszczególne segmenty mogą nie przylegać dokładnie do siebie • poligony mogą tworzyć otwarte powierzchnie • sąsiadujące poligony mogą przecinać się lub tworzyć wolne przestrzenie • linie (polilinie) mogą być utworzone z wielu oderwanych segmentów
TOPOLOGICZNY MODEL WEKTOROWY W prostym modelu wektorowym obiekty opisywane są bezpośrednio przez ciągi współrzędnych punktów. Jest to opis kompletny pod względem geometrycznym, ale nie dający bezpośrednio informacji o wzajemnym powiązaniu obiektów między sobą. Ewentualne powiązania między obiektami (np. sąsiedztwo) mogą być wykrywane jedynie przez zastosowanie geometrii analitycznej. Inaczej sytuacja wygląda w topologicznym modelu wektorowym, który oprócz informacji geometrycznych definiujących położenie I kształt obiektów zawiera również informacje o wzajemne powiązania między obiektami. W topologicznym modelu wektorowym wyodrębnia się trzy rodzaje elementów topologicznych: • zerowymiarowe - punkty węzłowe, • jednowymiarowe - linie graniczne, • dwuwymiarowe - obszary,
TOPOLOGIA • Przetwarzanie danych z współdzieleniem geometrii (lepsza jakość obsługi): • Ograniczenie sposobu dzielenia właściwości geometrycznych • np. przyległe poligony, takie jak działki mają wspólne krawędzie • Zdefiniowanie oraz implementacja integralności danych: • między działkami nie powinno być wolnych przestrzeni • Zapewnienie możliwości wykonywania zapytań przestrzennych • - szybka identyfikacja obiektów spełniających zadane kryteria
PODSTAWOWE POJĘCIA MODELU WEKTOROWEGO • etykieta (label, polygon interior point) – punkt wskazujący na właściwości danej powierzchni • węzeł (node) – punkt wspólny obiektów, najczęściej odnosi się do przecięć linii lub zakończeń tych odcinków • punkt odniesienia (entity point) – punkt lokalizujący ścisłe położenie obiektów punktowych oraz liniowych i powierzchniowych posiadających reprezentację znakową typu punktowego • kierunek linii – własność odcinak linii porządkująca punkty tworzące obiekt • granica obszaru (border boundary) – odcinek linii ograniczający dany obiekt powierzchniowy • wyspy, dziury i enklawy – charakterystyczne części obszarów ograniczone całkowicie innymi obiektami i powierzchniowymi (ring).
REPREZENTACJA OBIEKTU LINIOWEGO W TOPOLOGICZNYM MODELU WEKTOROWYM
REPREZENTACJA OBIEKTU POWIERZCHNIOWEGO - POLIGONU W TOPOLOGICZNYM MODELU WEKTOROWYM
ZŁOŻONY MODEL TOPOLOGICZNY • Proces tworzenia złożonego modelu wektorowego jest z definicji bardziej skomplikowany i zajmuje więcej czasu, jednakże posiada szereg zalet: • umożliwia zadawanie zapytań i analizę danych • punkty reprezentują poligony o zerowym polu i długości • linie (łuki – ang. arcs) – rozpoczynają się i kończą węzłami (ang. nodes) • poligony są zbiorem połączonych linii • Określenie segmentów- odcinków wspólnych dla poligonów zapewnia: • mniejszą liczbę linii w bazie danych • przyległe poligony nie tworzą wolnych przestrzeni i nie przecinają się • bardziej spójny obraz podczas wizualizacji danych
TOPOLOGIA LINII TOPOLOGIA POLIGONÓW TOPOLOGIA WĘZŁÓW
RODZAJE WĘZŁÓW • NORMAL NODES • W miejscu przecięcia trzech lub więcej linii granicznych • Akceptowane zawsze • 2. DANGLING NODES • Na końcu linii granicznych • Akceptowane w obiektach liniowych np.. drogi, rzeki ale nie dla poligonów • 3. PSEUDONODES • Między dwoma liniami • W poligonach wyspach, zmianie atrybutów
LINIE GRANICZNE – LINIE – ŁUKI We wszystkich przecięciach wymagane są węzły. Wiszące linie są akceptowane pod warunkiem, że nie przekraczają wartości progowej tolerancji. Na przykład jeżeli próg tolerancji został ustalony na wartość 5 metrów, linie o długości mniejszej niż 5 metrów są uznawane za linie wiszące (błąd) a linie o długości powyżej 5 metrów są prawidłowymi danymi.
CZYSZCZENIE DANYCH – CLEANING • Usuwanie nieprawidłowych linii i węzłów • Łączenie brakujących segmentów (w określonej odległości) • Usuwanie zbędnych pseudowęzłów • Dodanie węzłów do wszystkich przecięć • Dodanie punktów (Label points) centroidów do poligonów • BUDOWANIE TOPOLOGII – TOPOLOGY BUILDING • Nie zmienia położenia obiektów, ale polega na ich scalaniu • Tworzenie tablicy atrybutów • Ponowne tworzenie po dodawaniu – edycji danych w tym: • dodawanie lub usuwanie linii i punktów • dodawanie lub usuwanie danych atrybutów
WĘZŁY TIN – TRIANGULATED IRREGULAR NETWORK
PROSTOKĄTY OGRANICZAJĄCE Jedną z najprostszych metod organizacji danych sprzyjającą szybszemu dostępowi jest wprowadzenie w stosowanych do reprezentacji obiektów strukturach danych pewnych dodatkowych informacji. Zadaniem ich jest uproszczone, w sensie przestrzennym, zobrazowanie obiektów, które możemy nazwać aproksymacją obiektów właściwych. Istotą takiej aproksymacji będzie zachowywanie przybliżonej informacji o obiekcie, zapisanej w maksymalnie uproszczony sposób wygodny do wykonywania analiz. Najpowszechniejszym ze spotykanych uproszczeń jest aproksymacja obiektu minimalnym prostokątem o bokach równoległych do osi układu współrzędnych, w którym można zmieścić cały rozpatrywany obiekt. Prostokąt taki będziemy nazywali minimalnym prostokątem ograniczającym. W literaturze polskiej można się spotkać z określaniem takiego prostokąta „pudełkiem”
STRUKTURY DANYCH WEKTOROWYCH SIEĆ PUNKTÓW – składa się z uporządkowanego geometrycznie zbioru obiektów punktowych, na podstawie ich wzajemnej relacji położenia możliwe jest wnioskowanie o poprawności zapisu danych. W przypadku, gdy sieć punktów ma postać regularnej siatki (grid), wtedy taka strutura jest równoważna modelowi rastrowemu, ponieważ dziedziczy wszystkie jego własności. Przykładem takiej struktury jest m.in.. Numeryczny model terenu zapisany jako prostokątna sieć punktów. SIEĆ – struktura liniowa, utworzona z odcinków o dowolnym kierunku, przecinających się w węzłach. Najczęściej przenoszona bezpośrednio ze Świata rzeczywistego (np.. sieć drogowa, kolejowa, telekomunikacyna itp.). Uwzględnienie kierunku linii w topologicznym modelu wektorowym zapewnia Niezależnie analizę parametrów sieci w dwu kierunkach. Tego typu struktura może być analizowana za pomocą tzw. analiz sieciowych z grupy Analiz przestrzennych, m.in.. Poszukiwanie optymalnej trasy pomiędzy zadanymi punktami, optymalizacja lokalizacji centrów sieci oraz wyznaczenie Zasięgu obszaru obsługi dla centrów w sieci i ich dostępności. DRZEWO – zespół skierowanych obiektów liniowych, łączących się w węzłach, z każdego węzła może wychodzić tylko jeden obiekt. Tego typu sieć Nazywana jest siecią typu hierarchicznego i może na przykład reprezentować powiązanie rzek w systemach rzecznych (rzędowość). WYPEŁNIENIE POWIERZCHNI – (GT – poligony) – przyległe obszary zachowujące ściśle relacje wzajemnego położenia sąsiedztwa. Najczęściej powiązane zależnościami hierarchicznymi a grupy obiektów niższego rzędu tworzą pewne nadklasy o kolejnych stopniach agregacji obiektów. Przykładowo, jednostki podziału administracyjnego kraju.
INDEKSOWANIE PRZESTRZENNE Wprowadzenie aproksymacji obiektów przez prostokąty ograniczające jest niewątpliwą koniecznością z punktu widzenia efektywnego dostępu do obiektów przechowywanych w systemie. Należy sobie jednak zdawać sprawę, że prostokąty ograniczające rozwiązują jedynie częściowo problem dostępu do danych. Kolejnym bardzo ważnym czynnikiem w optymalizacji dostępu do danych SIP jest zastosowanie odpowiednich systemów indeksowania przestrzennego, aby przy wyborze nie przebiegać zawsze przez całą listę obiektów lecz operować na pewnych uporządkowanych przestrzennie grupach obiektów, które mogą posiadać również własne (grupowe) prostokąty ograniczające. Tak więc jeśli stwierdzimy, że prostokąt ograniczający danej grupy daje się odrzucić wtedy ją całą pomijamy. Poniżej przedstawiono charakterystykę dwóch najczęściej stosowanych metod indeksowania przestrzennego DRZEWA CZWÓRKOWE - quadtree i oraz R-DRZEWA - R-tree. Stosowanie tych metod nie oznacza rezygnacji z prostokątów ograniczających, które stanowią także podstawę do zastosowania metod indeksowania.
R-DRZEWA Indeksowanie danych z wykorzystaniem struktury R-tree podobnie jak quadtree opiera się na podziale obszaru właściwego dla bazy danych na mniejsze prostokątne fragmenty. W podziale niniejszym w odróżnieniu do quadtree dozwolone jest pokrywanie się utworzonych w wyniku podziału fragmentów. Utworzone w fragmenty organizuje się w strukturę drzewa. Charakterystyczne w utworzonym drzewie jest występowanie dwóch rodzajów węzłów to jest tzw. węzłów pośrednich oraz liści. Węzły pośrednie zawierają informacje o zakresie grupowanych węzłów pośrednich niższego poziomu. Liście natomiast zawierają dostęp do konkretnych obiektów terenowych. Struktura R-tree charakteryzowana jest maksymalną liczbą możliwych potomków w węźle M oraz liczbą minimalną obliczaną jako M/2. Ilustrację organizacji struktury R-tree.
PROCEDURA SPRAWDZENIA CZY PUNKT D NALEŻY DO OKRĘGU OPISANEGO NA ZADANYM TRÓJKĄCIE T(A,B,C)
DWIE MOŻLIWOŚCI OKREŚLENIA OKRĘGU OPISANEGO NA TRÓJKĄCIE BĘDĄCYM WYBRANYMI WIERZCHOŁKAMI CZWOROBOKU
WŁAŚCIWOŚĆ CZWOROBOKU • Niech abcd będzie czworobokiem z przekątną ab, wtedy: • albo c jest w środku okręgu opisanego na trójkącie abd a d jest w środku okręgu opisanego na trójkącie abc • - albo c jest na zewnątrz okręgu opisanego na trójkącie abd a d jest na zewnątrz okręgu opisanego na trójkącie abc
v1 e2 e1 f1 v3 v2 e3 e5 e6 e4 f2 f6 f3 v6 v4 e7 e8 v5 e9 e11 e10 f5 f4 v7 v10 v9 e14 e12 e13 v8 REPREZENTACJA GRAFU NA PŁASZCZYŹNIE – WIERZCHOŁKI I KRAWĘDZIE
PLANARNY PROSTY GRAF LINIOWY • Planarny prosty graf liniowy (PSLG) jest osadzeniem na płaszczyźnie • planarnego grafu G = (V, E) z: • 1. każdym wierzchołkiem vVodwzorowanym w różny punkt płaszczyzny, • każda krawędź eEodwzorowaną w odcinekmiędzy punktami końcowymi wierzchołków grafu takimi że żadne dwa odcinki (segmenty) nie przecinają się z wyjątkiem ich punktów końcowych. edge (14) vertex (10) face (6) W ten sposób planarny graf liniowy definiuje się jako odwzorowanie matematycznego obiektu (grafu planarnego) w obiekt geometryczny. Odwzorowanie wymaga zdefiniowania współrzędnych oraz lokalizacji
WIELOBOKI - POLIGONY Wielobok (polygon)jest obszarem płaszczyzny ograniczonym przez skończony zbiór odcinków tworzących prostą zamkniętą krzywą (łamaną) (Wymiar przestrzeni wynosi d = 2 z definicji.) Niechv0, v1, ..., vN-1 będzieN punktami płaszczyzny; punkty nazywamy wierzchołkamivertices. Nieche0 = v0v1, e1 = v1v2, ..., eN-1 = vN-1v0 będzie N segmentami (odcinkami) Łączącymi punkty; segmenty nazywamy krawedziamiedges. Krawędzie ograniczają wielobok wtedy i tylko wtedy gdy przecięcie każdej pary krawędzi przyległych w danym porządku jest pojedynczym wierzhołkiem dzielonym przez te dwie krawędzie: ei ei+1 = vi+1dlai = 0, N - 1 Numeracja wierzchołków przeciwna do ruchu wskazówek zegara
Boundary Interior POLIGONY Segmenty są połączone na końcach, tworzą rodzaj krzywej, tworzą cykl zamknięty, a krzywa zamknięta jest prosta, ponieważ nieprzylegające segmenty nie przecinają się. Wnętrze i zewnętrze (Interior and exterior) Twierdzenie Jordana. Każda prosta zamknięta krzywa na płaszczyźnie dzieli płaszczyznę na dwie części. Poligon = interior boundary Zewnętrze exterior (nieograniczone) oraz wnętrze interior (ograniczone). W ten sposób poligon P jest obszarem płaszczyzny ograniczonym przez skończony zbiór odcinków (segmentów) tworzących zamkniętą prostą krzywą.
PROSTY POLIGON Not vertices PROSTY POLIGON Poligon jest prosty (simple)wtedy i tylko wtedy gdy nieprzyległe krawędzie nie przecinają się. eiej = dla wszystkich 0 j, i N - 1 orazji + 1.
LISTA DWUKIERUNKOWA KRAWĘDZI Doubly connected edge list (DCEL) Struktura danych DCEL reprezentuje PSLG. Posiada jeden element (“edge node”) dla każdej krawędzi w PSLG. Każdy element składa się z 6 pól: V1 Początek krawędzi V2 Koniec krawędzi (destination); założenie orientacji F1 Ścianka po lewej stronie krawędzi, względem orientacji V1V2 F2 Ścianka po prawej stronie krawędzi, względem orientacji V1V2 P1 Index elementu pierwszej krawędzi następującej zakrawędzią V1V2, podczas przechodzenia w kierunku przeciwnym do ruchu wskazówek zegara do V1 P2 Index elementu pierwszej krawędzi następującej zakrawędzią V1V2, podczas przechodzenia w kierunku przeciwnym do ruchu wskazówek zegara do V2
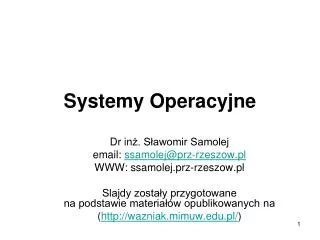
STRUKTURA DCEL GRAFU v3 f4 e3 f2 e5 v2 e1 v1 e4 f1 e2 f3 v4 Przykład części PSLG i DCEL
2 2 3 STRUKTURA DCEL GRAFU F2 13 8 9 4 12 F6 11 1 3 10 F3 Edge V1 V2 LeftF RightF PredE NextE ------------------------------------------------- 1 1 2 F6 F1 7 13 2 2 3F6F2 1 4 3 34F6 F3 2 5 4 3 9 F3 F2 3 12 5 4 6F5F3 8 11 6 6 7 F5 F4 5 10 7 1 5 F5 F6 9 8 8 45 F6 F5 3 7 9 1 7 F1 F5 1 6 10 7 8 F1 F4 9 12 11 6 9 F4 F3 6 4 12 9 8 F4 F2 11 13 13 2 8 F2 F1 2 10 F1 F4 6 7 6 9 5 F5 1 4 7 8 5