Download
1 / 58
610 likes | 976 Views
Platooning Dynamics and Control on an Intelligent Vehicular Transport System. ALEXANDER LEVEDAHL 1 , FROYLAN MORALES 2 , AND GEORGE MOUZAKITIS 1 1 THE COOPER UNION, NEW YORK, NY 2 THE UNIVERSITY OF TEXAS, BROWNSVILLE, TX {levada, mouzak}@cooper.edu, Froylan.Morales48@utb.edu

E N D
Platooning Dynamics and Control on an Intelligent Vehicular Transport System ALEXANDER LEVEDAHL1, FROYLAN MORALES2, AND GEORGE MOUZAKITIS1 1 THE COOPER UNION, NEW YORK, NY 2 THE UNIVERSITY OF TEXAS, BROWNSVILLE, TX {levada, mouzak}@cooper.edu, Froylan.Morales48@utb.edu August 5, 2010
Motivation • Reduced Oil Consumption • Rise in fuel costs • BP • Reduced drag and congestion • Higher traffic density
Table of Contents • Potential Field Navigation • MAS-Net Platform Test Bed • Nonlinear Control System • Conclusion
Platoon Structure n-vehicle platoon: {Leader, Follower1, Follower2,…, Followern-1} An 8 vehicle platoon of Buick LeSabres [PATH]
Autonomous Navigation • Vector field • Navigational information at every point in space, all contained in a single matrix • Waypoints (attractive force) and obstacles (repulsive force)
Generating the Vector Field • Linear combination
Vehicle Dynamics • Holonomic dynamics • Update position on display every Δt = 0.5 sec
Vehicle Dynamics • Leader
Vehicle Dynamics • Followers • Inter-vehicle specifications: • Vehicles in platoon must maintain a safe, fixed distance from each other • Only the lead vehicle navigates
Vehicle Dynamics • Physical system implementations • Artificial potential fields • Fluid dynamics • Spring dynamics
Spring Dynamics • Hooke’s Law • Ideal, undamped • Perturbations introduce oscillations Undesirable aerodynamic performance loss
Spring Dynamics • Critical damping eliminates unwanted oscillations
Video • PlatoonMergeSim.wmv • PlatoonMergeSimMASnet.wmv
MAS-net Test Bed • MAS-motes • Two-wheel differentially steered chassis • MicaZ programming and communication board from Crossbow • TinyOS, nesC
Pseudo-GPS • 1280x1024 resolution camera • Analyze images using University of Washington’s ARToolKit • Unique markers to determine robot position and orientation
RobotCommander • Developed by CSOIS • Written in C++ • Dispatching application for mobile MAS-motes • Periodic pGPS calibrations
MAS-net Communication Protocol • MAS-net command message • Command header • Command ID • Destination ID • Payload • AM Transceiver transmits message over wireless channel
Existing Platooning Implementation • Waypoints • Orientation error • Increase duty cycle on appropriate motor
MAS-net Platform Adaptation • Discrete wheel states • More gently sloping vector field
Video • MAS-net Longitudinal Merging (MoteMerge.wmv)
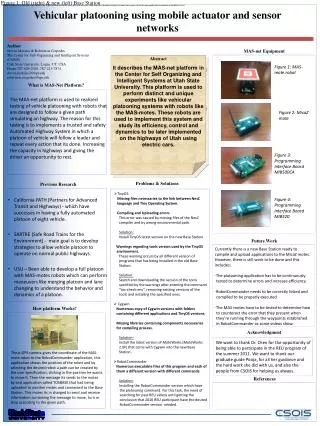
MAS-Net This image is the global image of the MAS-Net platform. This image is processed on Matlab to get the RGB values of each individual pixels. All of these values are then outputted to a file, which is then read by a C++ program I developed to choose the correct track points.
Matlab code • MatLab code reads the image and determines which of the pixels are considered white. • It arranges and organizes the pixel coordination's into two files read by C++ program. • Benefits • Simplicity of doing it on Matlab • Saves processing time and power . • Makes C++ program less complex.
C++ code • C++ program then loads the points into two vectors separating the X and Y. • These two vectors still have to be refined because the line of the track contains 14px in width.
C++ code continued • This code chooses the outer most white pixel of the track line by scanning the X axis only.
C++ code continued After we have the two new vectors loaded with the outer white pixels a distance algorithm has to be applied for equally distant waypoints.
Robotcomander • After applying this code into RobotCommander we get a leader platoon robot following the track. • soloBot.wmv
Platooning behavior • Following robot’s waypoints are triggered when robot in front reaches a specific destination. • platoon.wmv
Platoon merging • 2nd track was added to create a 2nd platoon and make the merging possible .
Platoon after Platoon Merge • First merge that was accomplished was the “platoon after platoon merge” shown in this video. • merge1.wmv
2nd Merge • Interleaving merge • More control over platoon required • Faster merging • merge2.wmv
Nonlinear Control and Measurement Error • Design of the Control System • Algorithms to handle Real World Scenarios • Measurement Error • Implementation on MASNet Platform
Real World Scenarios • Path Splitting • Lane Changing • Platoon Merging
Video • Path Splitting (trial1.avi)
Merging • Attach to End of Platoon • If Platoon within Certain Distance: Merge • Interlace • Similar to Zipper • Platoon Increases Intervehicular Distance
Video • Lane Changing (trialLane.avi)
Measurement Error • Gaussian Error • ISE and ITAE measures of error
Measurement Error • Integral Square Error = • Integral Time Average Error =