Download
1 / 8
80 likes | 169 Views
Controllability and Feasibility Analysis for Decomposition Scheme in DRE System. Chen Xi. Related Work.

E N D
Controllability and Feasibility Analysis for Decomposition Scheme in DRE System Chen Xi
Related Work • X. Wang, J. Dong, C. Lu, and X. Koutsoukos, “DEUCON: Decentralized End-to-End Utilization Control for Distributed Real-Time Systems", IEEE Transactions on Parallel and Distributed Systems, vol.18, no.7, pp. 996-1009, July 2007 • X. Wang, Y. Chen, C. Lu, X. Koutsoukos, "On Controllability and Feasibility of Utilization Control in Distributed Real-Time Systems," 19th Euromicro Conference on Real-Time Systems , pp.103-112, 2007 • K. S. Narendra and N. O. Oleng’, “Exact output tracking in decentralized adaptive control,” IEEE Transactions on Automation Control, vol. 47, pp. 390–395
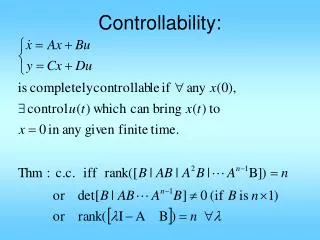
Controllability and Feasibility Analysis for DRE System • Motivation • Use the task allocation to • Ensure system controllability • Increase system feasibility
Main contributions • Focus on the controllability and feasibility analysis of utilization control in DRE system . It is different with previous work to control the processors’ utilization by minimizing cost or by load balancing. • They formulate the controllability and feasibility problem as an end-to-end task allocation problem.
Main contributions(continue) • Use control theory to give the controllable conditions for the DRE system while ensuring the system feasibility. • Design the efficient task allocation problem to ensure a system is controllable and feasible. • Analyze the impact of workload variations on controllability and feasibility . • Online algorithm to dynamically adjust task allocations.
Idea • Can this controllability analysis be extended to the decomposition mechanism? (theoretical guidance in efficient decomposition scheme design and reasonable decentralized controllers arrangement)
Idea(continue) • How many controllers should be employed? • In a subsystem, how to dedicate the task to each controller to ensure controllability and feasibility? • How to give the algorithm for task allocation in a subsystem and between subsystems?
Idea(continue) • What is the difference between the two situations: communication for the states of subsystem is allowed between controllers, the communication is not allowed but the information of other systems’ set point are available? ( Apply the idea from the “Exact Output Tracking in Decentralized Adaptive Control Systems” to help analyze this question.)