Download
1 / 21
230 likes | 719 Views
FUNDAMENTOS DE CINEMATICA por: Ing. Luis L. López T. Grados de libertad y Tipos de movimiento. Grados de libertad ( gdl )=numero de movimientos independientes, para definir posición. Tipos de movimiento Translacion pura, Rotacion pura, complejo ( Traslacion + Rotacion ).

E N D
FUNDAMENTOS DE CINEMATICApor: Ing. Luis L. López T. Grados de libertad y Tipos de movimiento Grados de libertad (gdl)=numero de movimientos independientes, para definir posición. Tipos de movimiento Translacion pura, Rotacion pura, complejo (Traslacion +Rotacion) [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
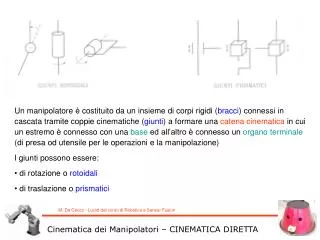
Eslabones, nodos y Juntas Eslabón: Elementos que componen los mecanismos Nodos: Puntos de unión con otros eslabones Junta: Unión de eslabones por medio de sus nodos [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Tipos de Junta. [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, México, 2000.
Ecuación de Gruebler/Kutzbatch M=grados de libertad (gdl) L=numero de eslabones J=numero de juntas G=numero de eslabones fijos J1=junta de 1 (gdl) J2=junta de 2 (gdl) Ecuacion de Gruebler M=3L-2J-3G Ecuacion de Gruebler/Kutzbatch M=3(L-1)-2J1-2J2 [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Ejemplo de tipos de juntas y uso de ecuación de Gruebler [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Clasificación según gdl [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Paradoja de GrueblerNo siempre se cumple la ecuacion de Gruebler, la geometriatambien influye en los grados de libertad [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
IsómerosMecanismos conformados por la misma cantidad y tipo de eslabones pero unidos de diferente forma [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Transformación de eslabonamientos [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Movimiento Intermitente [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Inversión de eslabón fijo4 barras 6 barras [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Condición de Grashof Condicion de Grashof L+S<P+Q Un eslabón podrá dar una vuelta completa L=Longitud eslabón mas largo S=Longitud eslabón mas corto P=Longitud eslabón restante Q=Longitud eslabón restante [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Clasificación de Baker [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Mas de 4 barras [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Ventaja mecánica [2] J. E. Shigley, J. J. Vicker , Teoría de maquinas y mecanismos, McGraw Hill, Mexico, 1988.
Curvas del acoplador [2] J. E. Shigley, J. J. Vicker , Teoría de maquinas y mecanismos, McGraw Hill, Mexico, 1988.
Motores eléctricos [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Motor corriente continuaVelocidad vs Par imán permanente Velocidad vs Par diferentes devanados [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Motor corriente alternaVelocidad vs Par [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000.
Referencias [1] Robert L. Norton, Diseño de Maquinaria, McGraw Hill, Mexico, 2000. [2] J. E. Shigley, J. J. Vicker , Teoría de maquinas y mecanismos, McGraw Hill, Mexico, 1988.