Download
1 / 1
10 likes | 126 Views
Box-Like Superquadric Recovery in Range Images by Fusing Region and Boundary Information. Dimitrios Katsoulas and Dimitrios Kosmopoulos. NCSR Demokritos, Institute for Informatics and Telecommunications, Computational Intelligence Laboratory. 4. Our Approach. Introduction.

E N D
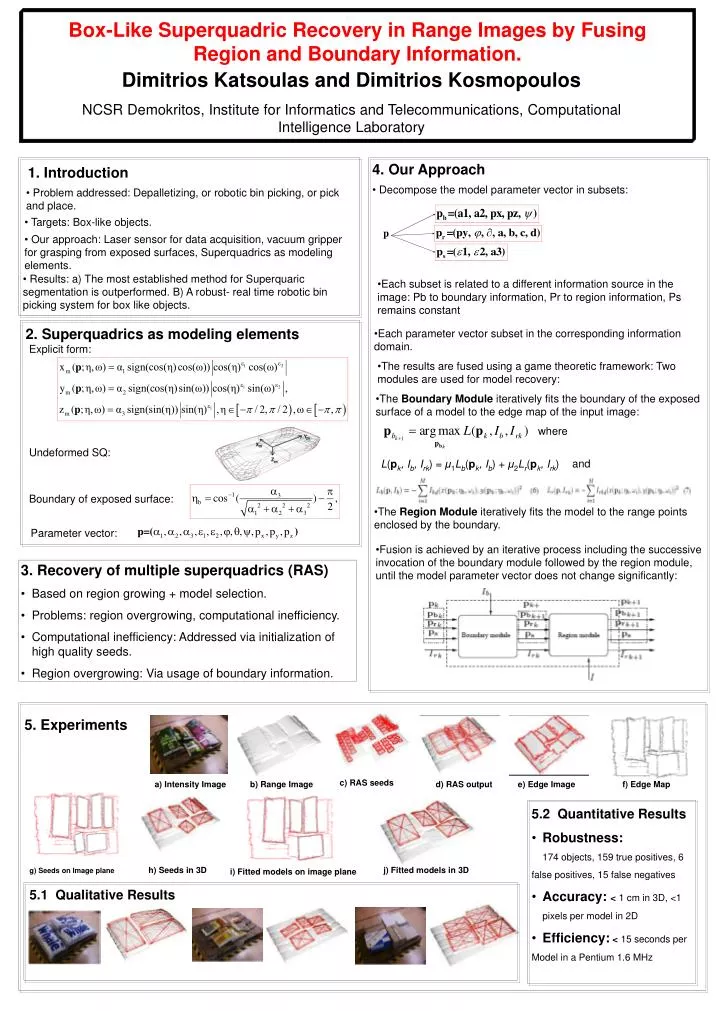
Box-Like Superquadric Recovery in Range Images by Fusing Region and Boundary Information. Dimitrios Katsoulas and Dimitrios Kosmopoulos NCSR Demokritos, Institute for Informatics and Telecommunications, Computational Intelligence Laboratory 4. Our Approach • Introduction • Decompose the model parameter vector in subsets: • Problem addressed: Depalletizing, or robotic bin picking, or pick and place. • Targets: Box-like objects. • Our approach: Laser sensor for data acquisition, vacuum gripper for grasping from exposed surfaces, Superquadrics as modeling elements. • Results: a) The most established method for Superquaric segmentation is outperformed. B) A robust- real time robotic bin picking system for box like objects. • Each subset is related to a different information source in the image: Pb to boundary information, Pr to region information, Ps remains constant 2. Superquadrics as modeling elements • Each parameter vector subset in the corresponding information domain. Explicit form: • The results are fused using a game theoretic framework: Two modules are used for model recovery: • The Boundary Module iteratively fits the boundary of the exposed surface of a model to the edge map of the input image: where Undeformed SQ: and L(pk, Ib, Irk) = μ1Lb(pk, Ib) + μ2Lr(pk, Irk) Boundary of exposed surface: • The Region Module iteratively fits the model to the range points enclosed by the boundary. Parameter vector: • Fusion is achieved by an iterative process including the successive invocation of the boundary module followed by the region module, until the model parameter vector does not change significantly: • 3. Recovery of multiple superquadrics (RAS) • Based on region growing + model selection. • Problems: region overgrowing, computational inefficiency. • Computational inefficiency: Addressed via initialization of high quality seeds. • Region overgrowing: Via usage of boundary information. 5. Experiments c) RAS seeds a) Intensity Image b) Range Image d) RAS output e) Edge Image f) Edge Map • 5.2 Quantitative Results • Robustness: • 174 objects, 159 true positives, 6 • false positives, 15 false negatives • Accuracy: < 1 cm in 3D, <1 • pixels per model in 2D • Efficiency: < 15 seconds per • Model in a Pentium 1.6 MHz h) Seeds in 3D j) Fitted models in 3D g) Seeds on Image plane i) Fitted models on image plane 5.1 Qualitative Results