Download
1 / 33
350 likes | 471 Views
Delay Reduction via Lagrange Multipliers in Stochastic Network Optimization. Longbo Huang Michael J. Neely EE@USC. WiOpt 2009. *Sponsored in part by NSF Career CCF and DARPA IT-MANET Program. Outline. Problem formulation

E N D
Delay Reduction via Lagrange Multipliers in Stochastic Network Optimization Longbo Huang Michael J. Neely EE@USC WiOpt 2009 *Sponsored in part by NSF Career CCF and DARPA IT-MANET Program
Outline • Problem formulation • Backlog behavior under Quadratic Lyapunov function based Algorithm (QLA): an example • General backlog behavior result of QLA for general SNO problems • The Fast-QLA algorithm (FQLA) • Simulation results • Summary
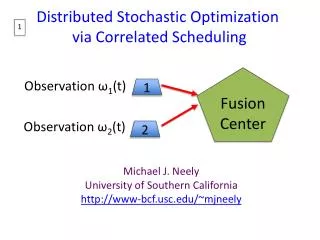
Problem Description: A Network of r Queues Slotted Time, t=0,1,2,… S(t) = Network State, Time-Varying, IID over slots (e.g. channel conditions, random arrivals, etc.) x(t) = Control Action, chosen in some abstract set X(S(t)) (e.g. power/bandwidth allocation, routing) (S(t), x(t)) costs: f(t)=f(S(t), x(t)) generates:Aj(t)=gj(S(t), x(t)) packets to queue j serves:μj(t)=bj(S(t), x(t)) packets in queue j [f(), g(), b() are only assumed to be non-negative, continuous, bounded] The stochastic problem: minimize: time average cost subject to: queue stability.
Problem Description: A Network of r Queues Slotted Time, t=0,1,2,… S(t) = Network State, Time-Varying, IID over slots (e.g. channel conditions, random arrivals, etc.) x(t) = Control Action, chosen in some abstract set X(S(t)) (e.g. power/bandwidth allocation, routing) (S(t), x(t)) costs: f(t)=f(S(t), x(t)) generates:Aj(t)=gj(S(t), x(t)) packets to queue j serves:μj(t)=bj(S(t), x(t)) packets in queue j [f(), g(), b() are only assumed to be non-negative, continuous, bounded] The stochastic problem: minimize: time average cost subject to: queue stability. QLA achieves: [G-N-T FnT 06] Avg. cost: fav <= f*av + O(1/V) Avg. Backlog: Uav <= O(V)
An Energy Minimization Example: The QLA algorithm μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) U2 U3 U4 U1 U5 Goal: allocate power to support the flow with min avg. energy expenditure, i.e.: Min: avg. ΣiPi s.t. Queue stability S1(t) S2(t) S3(t) S4(t) S5(t) U2 W23(t) U3 Link 2->3 The QLA algorithm (built on Backpressure): 1. Compute the differentiable backlog Wii+1(t)=max[Ui(t)-Ui+1(t), 0], 2. Choose (P1(t), …P5(t) that maximizes: Σi[Wii+1(t)μi(Pi(t)) -VPi(t)] =Σi[Wii+1(t) Si(t) –V]Pi(t) e.g., if S2(t)=2, then if W23(t)*2>V, we set P2(t)=1.
An Energy Minimization Example: Backlog under QLA μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) Goal: Min: avg. ΣiPi s.t. Queue stability U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Queue snapshot under QLA with V=100, first 100 slots: U1 U2 size U3 U4 U5 time
An Energy Minimization Example: Backlog under QLA μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) Goal: Min: avg. ΣiPi s.t. Queue stability U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Queue snapshot under QLA with V=100, first 500 slots: U1 U2 size U3 U4 U5 time
An Energy Minimization Example: Backlog under QLA μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) Goal: Min: avg. ΣiPi s.t. Queue stability U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Queue snapshot under QLA with V=100, first 1000 slots: U1 U2 size U3 U4 U5 time
An Energy Minimization Example: Backlog under QLA μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) Goal: Min: avg. ΣiPi s.t. Queue stability U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Queue snapshot under QLA with V=100, first 5000 slots: U1 U2 size U3 U4 U5 time
An Energy Minimization Example: Backlog under QLA μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) Goal: Min: avg. ΣiPi s.t. Queue stability U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Queue snapshot under QLA with V=100, (U1(t), U2(t)): (500,400) t=1:500k
An Energy Minimization Example: Backlog under QLA μ1(t) μ2(t) μ3(t) μ4(t) μ5(t) R(t) Goal: Min: avg. ΣiPi s.t. Queue stability U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Queue snapshot under QLA with V=100, (U1(t), U2(t)): (500,400) t=1:500k t=5k:500k
General result: Backlog under QLA Theorem 1: If q(U) satisfies C1: for some L>0 independent of V, then under QLA, in steady state, U(t) is mostly within O(log(V)) distance from UV* = Θ(V). Implications: (1) Delay under QLA is Θ(V), not just O(V); (2) The network stores a backlog vector ≈UV*.
General result: Backlog under QLA Theorem 1: If q(U) satisfies C1: for some L>0 independent of V, then under QLA, in steady state, U(t) is mostly within O(log(V)) distance from UV* = Θ(V). Implications: (1) Delay under QLA is Θ(V), not just O(V); (2) The network stores a backlog vector ≈UV*. Let’s “subtract out” UV* from the network! Replace most of the UV* data with Place-Holder bits
Fast-QLA (FQLA): Using place-holder bits A single queue example: First idea: (1) choose number of place-holder bits Q, s.t., if U(t0)>=Q, then U(t)>=Q for all t>=t0. (2) Let U(0)=Q, run QLA. Start here
Fast-QLA (FQLA): Using place-holder bits A single queue example: First idea: (1) choose number of place-holder bits Q, s.t., if U(t0)>=Q, then U(t)>=Q for all t>=t0. (2) Let U(0)=Q, run QLA. actual backlog Advantage: delay reduced by Q, same utility performance. Start here reduced
Fast-QLA (FQLA): Using place-holder bits A single queue example: First idea: (1) choose number of place-holder bits Q, s.t., if U(t0)>=Q, then U(t)>=Q for all t>=t0. (2) Let U(0)=Q, run QLA. actual backlog ≈Θ(V) Advantage: delay reduced by Q, same utility performance. Start here reduced Problem: Q ≈ UV*-Θ(V), delay Θ(V).
Fast-QLA (FQLA): Using place-holder bits A single queue example: FQLA idea: Choose # of place-holder bits Q such that backlog under QLA rarely goes below Q. Problem: (1) U(t) will eventually get below Q, what to do? (2) How to ensure utility performance?
Fast-QLA (FQLA): Using place-holder bits A single queue example: FQLA idea: Choose # of place-holder bits Q such that backlog under QLA rarely goes below Q. Problem: (1) U(t) will eventually get below Q, what to do? (2) How to ensure utility performance? Answer: use virtual backlog process W(t) + careful pkt dropping
Fast-QLA (FQLA): Using place-holder bits A single queue example: FQLA: (1) Choose # of place-holder bits Q such that backlog under QLA rarely goes below Q. (2) Use a virtual backlog process W(t) with W(0)=Q to track the backlog that should have been generated by QLA. (3) Obtain action by running QLA based on W(t), modify the action carefully.
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Modifying the action
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Modifying the action
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Modifying the action
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Modifying the action
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Modifying the action
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Modifying the action
Fast-QLA (FQLA): Using place-holder bits A single queue example: If W(t)>=Q, same as QLA, admit A(t), serve μ(t), i.e., FQLA=QLA. If W(t)<Q, serve μ(t), only admit: A’(t)=max[A(t)-(Q-W(t)), 0]. This modification ensures: U(t) ≈ max[W(t)-Q, 0]. Now choose: Q=max[UV*-log2(V), 0] (1) ensures: Low delay: average U ≈ log2(V), (2) ensures W(t) rarely below Q, implying: Good utility & few pkt dropped: very few action modifications. Modifying the action
Fast-QLA (FQLA): Performance Theorem 2: If condition C1 in Theorem 1 holds, then we have under FQLA-Ideal: Recall: under QLA:
Simulation R(t) • Simulation parameters: • V= 50, 100, 200, 500, 1000, 2000, • Each with 5x106 slots, • UV*=(5V, 4V, 3V, 2V, V)T. U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Backlog % of pkt dropped
Simulation R(t) • Simulation parameters: • V= 50, 100, 200, 500, 1000, 2000, • Each with 5x106 slots, • UV*=(5V, 4V, 3V, 2V, V)T. U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Sample (W1(t),W2(t)) process: V=1000, t=10000:110000 Note: W1(t)>Q1=4952 & W2(t)>Q2=3952
Simulation R(t) • Simulation parameters: • V= 50, 100, 200, 500, 1000, 2000, • Each with 5x106 slots, • UV*=(5V, 4V, 3V, 2V, V)T. U2 U3 U4 U1 U5 S1(t) S2(t) S3(t) S4(t) S5(t) Quick comparison V=1000, U QLA≈15V=15000 U FQLA≈5log2(V)=250 60times better! Backlog % of pkt dropped
Summary • Under QLA, the backlog vector usually stays close to an “attractor” – the optimal Lagrange multiplier UV*. • FQLA subtracts out the Lagrange multiplier from the system induced by QLA by using place-holder bits to reduce delay.
Summary • Under QLA, the backlog vector usually stays close to an “attractor” – the optimal Lagrange multiplier UV*. • FQLA subtracts out the Lagrange multiplier from the system induced by QLA by using place-holder bits to reduce delay. Note: (1) Theorem 1 also holds when S(t) is Markovian, (2) FQLA-General for the case where UV* is not known, performance similar to FQLA-Ideal, (3) when q0(U) is “smooth”, we prove O(sqrt{V}) deviation bound, (4) The “Network Gravity” role of Lagrange multiplier. Details see ArXiv report 0904.3795
Thank you ! Questions or Comments?