Download
1 / 13
130 likes | 314 Views
New DeskTop ROBOT. 2009.01 ROBOTECH CO.,LTD R&D Center. 1. New DeskTop Robot 特点. ▶ 轻量高钢性压缩型材机器人 Body ▶ 机器人控制一体型 Desktop 机器人 ▶ 从 221 到 4461 ,小型到大型,多样化的 model Line up ▶ 普及型和高级型 model Line up 侍服马达型 / 步进马达 , Ball screw / Belt 运行型 ▶ 载重高,高速,高精密 3 方面的补强功能 , 精密转角 Motion 控制功能 ,

E N D
New DeskTop ROBOT 2009.01 ROBOTECH CO.,LTD R&D Center
1. New DeskTop Robot 特点 ▶ 轻量高钢性压缩型材机器人Body ▶ 机器人控制一体型Desktop 机器人 ▶ 从221 到4461,小型到大型,多样化的model Line up ▶ 普及型和高级型model Line up 侍服马达型/ 步进马达, Ball screw / Belt 运行型 ▶ 载重高,高速,高精密 3方面的补强功能, 精密转角Motion 控制功能, ▶Sealing 专用S/W
4.在传送速度范围(up to 100%)内均匀良好的经路追踪精密度: 0.5mm 以内(直线或圆弧补强动作市) • 针对Dynamic的Feed forword的控制功能可以减少时间延迟。 • 速度,电流指令方面插入Feed forword的控制功能-S/W。 由于速度变更出现的追踪误差(他公司) 由于速度变更出现的追踪误差(我公司) • 术语说明: 运动Dynamic– 机器人移动时根据加减速度的位置,与马达接触时,解除部位的速度会快速变化。 • Feed forword – 一种控制马达的功能,与控制loop的error 值无关,加入一种gain 的方法。
5. Dynamic Feed-forward 控制的快速反应 (Cycle time 改善) • 针对指令速度,加速度以及部件惯性的速度,电流指令补强控制。 • 速度,电流指令里加入“Feed forword”的控制功能。 针对Dynamics的Feed-forward控制功能的优点 他公司控制器反映慢的原因
位置 速度 电流 6. 通过Full-digital控制准确指定位置的精确度 控制位置精确度: +/- 1Encoder Pulse -模拟的情况 . 温度的变化导致模拟模式的选项值的变化,出现控制精确度下降。 . Servo Gain 操作处理未变数阻力,所以增加操作上的难度。 -数码的情况 . 没有温度调节,所以精确度增加。 . Servo Gain以数字控制,操作简便。 Digital指令 Digital指令
7. Notch Filter的使用可减少柔韧关节的震动抑制 • 电流loop前端加入S/W性质的Notch Filter。 • Notch Filter技法加入可以解除机器本身的震动。 无减震功能 减震功能的优点 • 术语说明: .Notch Filter – 以高级控制系统通过控制特性的分析,解除扰乱控制系统的内部因素的技法。
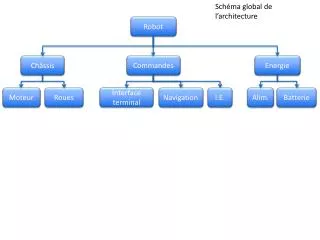
Motion Planning 位置 速度 电流 8. 加减速度与移动速度成正比的移动模式,在移动时对机器不会产生影响 • 轨迹计划(主控制器的Motion Planning)时选择与移动速度成正比的加减速度, • 减少低速运行时加减速度对机器产生的影响(与以前对比)。 • 术语说明: .Motion Planning– 在三次元空间里,为了使机器人移动到目的地,提前对各个机器部位做好运动计划。
9. 支持CAM 使用AUTOCAD格式的FILE操作机器人时,不需要另外制作机器人程序,可以直接利用。
10. 机器人控制器HARDWARE Spec RACK 结构– A/S, 增加用意 Multi DSP System – 根据技能分类使用3个DSP 加强控制性能,安全度 32Bit 使用最新高速DSP – Total 1280MIPS 使用最新ASIPM - Motor 驱动信誉度提高 15KHz 高速switching 控制– Motor在不产生噪音的状态下完成控制 使用大容量回生阻力- 加强高惯性部件驱动能力加强 ABS / INC encoder 全部适用 简洁方便的外观设计 增加安全装置与功能 - 识别CPU之间的错误动作- 监督全部电源的异常情况 - BRAKE单线监督- 监督控制器错误接触 - Remote power on/off
11. Demo 1. DT331S 2. DT3351P 3. 中国保留部分摄影