Download
1 / 25
260 likes | 386 Views
LCLS. Beam-Based Alignment with New Parameters Paul Emma, SLAC Oct. 24, 2003. Brief Review of Technique Old Parameters New Parameters Cub Horror. j. i th BPM. D E = 0. quad offsets and/or pole errors. D E < 0. The Method.

E N D
LCLS Beam-Based Alignment with New ParametersPaul Emma, SLACOct. 24, 2003 • Brief Review of Technique • Old Parameters • New Parameters • Cub Horror Paul Emma, SLAC
j ith BPM DE = 0 quad offsets and/or pole errors DE < 0 The Method • BPM readings, mi, written as sum of upstream kicks + offset, bi • Kicks are sensitive to momentum, pk, while offsets, bi, are not bi > 0 s Paul Emma, SLAC
...The Method • Reference line defined by incoming x0, x0 launch conditions mi linear only if Cij independent of p offset = -bi 1/p p (15 GeV/c)-1 (7.0 GeV/c)-1 (4.5 GeV/c)-1 Paul Emma, SLAC
quads ~300 mm BPMs LINAC best final trajectory UNDULATOR (122 m) steering elements Schematic layout Undulator misaligned w.r.t. linac axis with uncorrelated and correlated* (‘random walk’) component initial incoming launch error x0 x0 permanent magnet quad and undulator poles * suggested by C. Adolphsen Paul Emma, SLAC
Possible Absolute Trajectory Beam is launched straight down undulator, with possible inconsequential kink at boundary LINAC dispersion generated is insignificant Paul Emma, SLAC
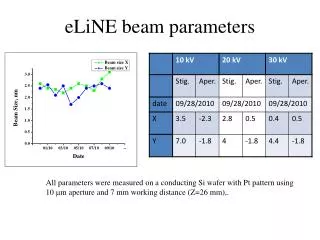
Input errors used for simulation 2 100 100 0.04 4 0 Paul Emma, SLAC
Natural Undulator Y-Focusing Now Included • Recently included natural focusing in Y-plane • No change if included in both simulation and reconstruction • Small change if not included in reconstruction (not shown) • Thanks to H.-D. Nuhn, S. Reiche, J. Welch Paul Emma, SLAC
+ Quadrupole positions o BPM offsets Initial BPM and quad misalignments (w.r.t. linac axis) quad positions BPM offsets Now launch beam through undulator Paul Emma, SLAC
+ Quadrupole positions e trajectory ‘real’ trajectory o BPM readback quad positions BPM readings Initial trajectory before any correction applied Paul Emma, SLAC
+ Quadrupole positions e trajectory o BPM readback rms beam size: 28 mm After 3rd pass of BBA with old parameters (14.3 GeV) sx 7 mm Dj 300° RON (FEL-code) simulation shows Lsat increased by <1 gain-length; R. Dejus, N.Vinokurov sy 6 mm Paul Emma, SLAC
+ Quadrupole positions e trajectory o BPM readback rms beam size: 33 mm After 3rd pass of BBA with new parameters 14 – 7.0 – 4.5 GeV sx 2.6 mm Dj 73° sy 2.7 mm Paul Emma, SLAC
+ Quadrupole positions o BPM offsets Now try 2-times worse initial random misalignments quad positions BPM offsets 2-mm BPM resolution + 100-mm initial BPM & quad offsets + 2-mm mover backlash Paul Emma, SLAC
After 3rd pass , new parameters, combined ‘worst case’ 2-mm BPM resolution + 100-mm initial BPM & quad offsets + 2-mm mover backlash sx 4.9 mm Dj 184° sy 6.0 mm Paul Emma, SLAC
Run BBA on 25 Random ‘worst case’ Seeds 2-mm BPM resolution + 100-mm initial BPM & quad offsets + 2-mm mover backlash Final X-trajectories Final Y-trajectories Paul Emma, SLAC
Run BBA on 25 Different Random ‘Worst-Case’ Seeds 2-mm BPM resolution + 100-mm initial BPM & quad offsets + 2-mm mover backlash Final X-mover settings Final Y-mover settings wider mover range at end due to lack of BPMs after undulator Paul Emma, SLAC
Run BBA on 25 Different Random ‘Worst-Case’ Seeds 2-mm BPM resolution + 100-mm initial BPM & quad offsets + 2-mm mover backlash x & y mover distrib. Djx,y Paul Emma, SLAC
Evaluation of BBA Simulation Results (old parameters) Psat and Lsat vs BPM res. Trajectory (BBA & Genesis) B. Fawley, H.-D. Nuhn, S. Reiche, PE Paul Emma, SLAC
LCLS Summary • BPMs resolve trajectory to <2 mm rms • BPM readings ‘drift’ <2 mm over 1-2 hr (temperature) • Quad movers settable to better than 2mm, or small steering coils for final correction • BPM readings are not sensitive to variable beam size, etc. • Trajectory is stable enough to <20% of beam size (already demonstrated in FFTB) • Kerry Wood pitches no-hitter in opener For new parameters: Alignment can be achieved at adequate level using beam-based technique, given that… Paul Emma, SLAC
Reserve Slides • Next slides are in reserve for questions Paul Emma, SLAC
+ Quadrupole positions e trajectory o BPM readback Add 10-mm random BPM offsets and correct trajectory (old parameters) Dj 113° Paul Emma, SLAC
+ Quadrupole positions e trajectory o BPM readback Wait 2 weeks, allow 3 bad BPMs, and 2 moved quads (old parameters) Dj 1137° • 2 weeks of ‘ATL’ diffusive ground motion • 3 BPM offsets drift by 20 mm • 2 quads moved by 20 mm s2 = A·T·L, 2 mm at T = 2 wk, L = 3.5 m Paul Emma, SLAC
+ Quadrupole positions e trajectory o BPM readback Now correct trajectory with ‘careful’ steering (old parameters) sx 3.5 mm Dj 173° Much beyond this level will require repeat iteration of BBA sy 4.8 mm Paul Emma, SLAC
After 3rd pass, new parameters, 2-mm mover backlash 2-mm random mover backlash (uniform dist. with FWHM = 4 mm) sx 1.8 mm Dj 83° sy 4.7 mm Paul Emma, SLAC
After 3rd pass, new parameters, 4-mm mover backlash 4-mm random mover backlash (uniform dist. with FWHM = 8 mm) sx 2.5 mm Dj 124° sy 8.0 mm Paul Emma, SLAC
After 3rd pass BBA, new parameters, 100-mm initial alignment 100-mm initial BPM & quad offsets (uncorrelated) sx 3.6 mm Dj 88° sy 2.8 mm Paul Emma, SLAC