Download
1 / 44
440 likes | 454 Views
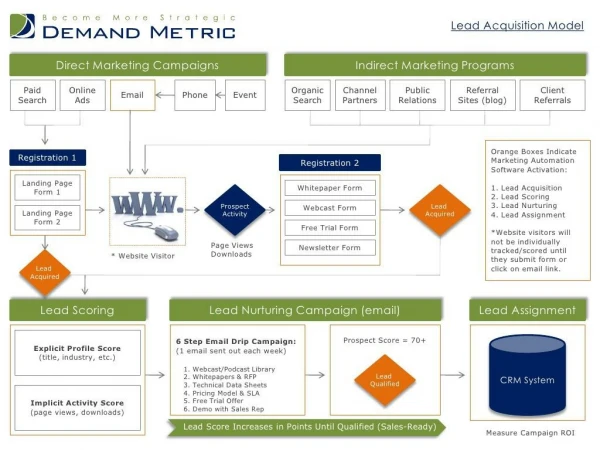
Explore the cutting-edge real-time 3D model acquisition pipeline developed by Princeton University, Stanford University, and Hunter College. Learn about the challenges, innovations, and research goals of low noise, high accuracy, high speed, low cost, and automatic operation. Discover the structured-light triangulation, fast ICP, and voxel grid alignment methods used for real-time scanning. Dive into the implementation of time-coded light patterns and the use of laser and camera triangulation for faster acquisition. Uncover the issues with merging, display, and alignment in the pipeline, along with solutions for misaligned scans and outliers. Look into postprocessing techniques for real-time display and high-quality models.

E N D
Real-Time 3D Model Acquisition Princeton University Stanford University Hunter College Szymon Rusinkiewicz Olaf Hall-Holt Marc Levoy Ilya Korsunsky
Possible Research Goals • Low noise • Guaranteed high accuracy • High speed • Low cost • Automatic operation • No holes
3D Model Acquisition Pipeline 3D Scanner
View Planning 3D Model Acquisition Pipeline 3D Scanner
View Planning Alignment 3D Model Acquisition Pipeline 3D Scanner
View Planning Alignment Merging 3D Model Acquisition Pipeline 3D Scanner
View Planning Alignment Done? Merging 3D Model Acquisition Pipeline 3D Scanner
View Planning Alignment Done? Merging Display 3D Model Acquisition Pipeline 3D Scanner
3D Model Acquisition Difficulties • Much (often most) time spent on “last 20%” • Merging, Displaying, View Planning • Pipeline not optimized for hole-filling • Not sufficient just to speed up scanner –must design pipeline for fast feedback
Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Human Done? Merging Display
Alignment Merging Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Challenge: Real Time Done? Display
Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Part I: Structured-LightTriangulation Done? Merging Display
Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Part II: Fast ICP Done? Merging Display
Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Part III: Voxel Grid Done? Merging Display
Laser Camera Triangulation • Project laser stripe onto object Object
Camera Triangulation • Depth from ray-plane triangulation Object Laser (x,y)
Triangulation • Faster acquisition: project multiple stripes • Correspondence problem: which stripeis which?
Multi-stripe Multi-frame Single-stripe Single-frame Continuum of Triangulation Methods Slow, robust Fast, fragile
Time-Coded Light Patterns • Assign each stripe a unique illumination codeover time [Posdamer 82] Time Space
Illumination history = (WB),(BW),(WB) Code Codes for Moving Scenes • Assign time codesto stripe boundaries • Perform frame-to-frametracking of correspondingboundaries • Propagate illumination history [Hall-Holt & Rusinkiewicz, ICCV 2001]
Designing a Code • Want many “features” to track:lots of black/white edges at each frame • Try to minimize ghosts – WW or BB “boundaries” that can’t be seen directly
Designing a Code 0000 1101 1010 0111 1111 0010 0101 1000 1011 0110 0001 1100 0100 1001 1110 0011 [Hall-Holt & Rusinkiewicz, ICCV 2001]
Implementation • Pipeline: • DLP projector illuminates scene @ 60 Hz. • Synchronized NTSC camera captures video • Pipeline returns range images @ 60 Hz. Project Code Capture Images Find Boundaries Match Boundaries Decode Compute Range
Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Part II: Fast ICP Done? Merging Display
ICP in the Real-Time Pipeline • Potential problem with ICP: local minima • In this pipeline, scans close together • Very likely to converge to correct (global) minimum • Basic ICP algorithm too slow (~ seconds) • Point-to-plane minimization • Projection-based matching • With these tweaks, running time ~ milliseconds[Rusinkiewicz & Levoy, 3DIM 2001]
Anchor Scans • If object moves too quickly or is out of range, ICP will fail • Global drift • Instead of aligning to last scan, keep set of scans to realign to • Large: have enough data • Distinct: don’t store too many • Allows user to restart scanning
Real-Time 3D Model Acquisition Pipeline 3D Scanner View Planning Alignment Part III: Voxel Grid Done? Merging Display
Merging and Rendering • Goal: visualize the model well enoughto be able to see holes • Cannot display all the scanned data – accumulates linearly with time • Standard high-quality merging methods:processing time ~ 1 minute per scan • Use fast voxel based merging technique
+ Merging and Rendering
Merging and Rendering • Point rendering, using accumulated normals for lighting
Problems with Merging • Misaligned Scans (error in ICP) • Moderate misalignment • Voxels rendered on top of one another • Noisy but OK
Problems with Merging • Misaligned Scans (error in ICP) • Outliers • Give wrong model • Eliminate thin and long triangles and associated points • Can be aggressive eliminating b/c of large amt data • Also rejects low quality data
Example: Photograph 18 cm.
Postprocessing • Real-time display • Quality/speed tradeoff • Goal: let user evaluate coverage, fill holes • Offline postprocessing for high-quality models • Global registration • High-quality merging (e.g., using VRIP [Curless 96])
Example: Photograph 18 cm.
Summary • 3D model acquisition pipeline optimized for obtaining complete, hole-free models • Use human’s time most efficiently • Pieces of pipeline selected for real-time use: • Structured-light scanner for moving objects • Fast ICP variant • Simple grid-based merging, point rendering
Limitations • Prototype noisier than commercial systems • Could be made equivalent with careful engineering • Ultimate limitations on quality: focus, texture • Scan-to-scan ICP not perfect alignment drift • Due to noise, miscalibration, degenerate geometry • Reduced, but not eliminated, by “anchor scans” • Possibly combine ICP with separate trackers