Download
1 / 29
290 likes | 517 Views
Institute for Personal Robots in Education -- One Year On. Tucker Balch - Georgia Tech Deepak Kumar - Bryn Mawr College Stewart Tansley - Microsoft Research. IPRE Introduction. Robotics research consistently active, dynamic Meanwhile, a crisis in CS attraction & retention

E N D
Institute for Personal Robots in Education --One Year On Tucker Balch - Georgia Tech Deepak Kumar - Bryn Mawr College Stewart Tansley - Microsoft Research
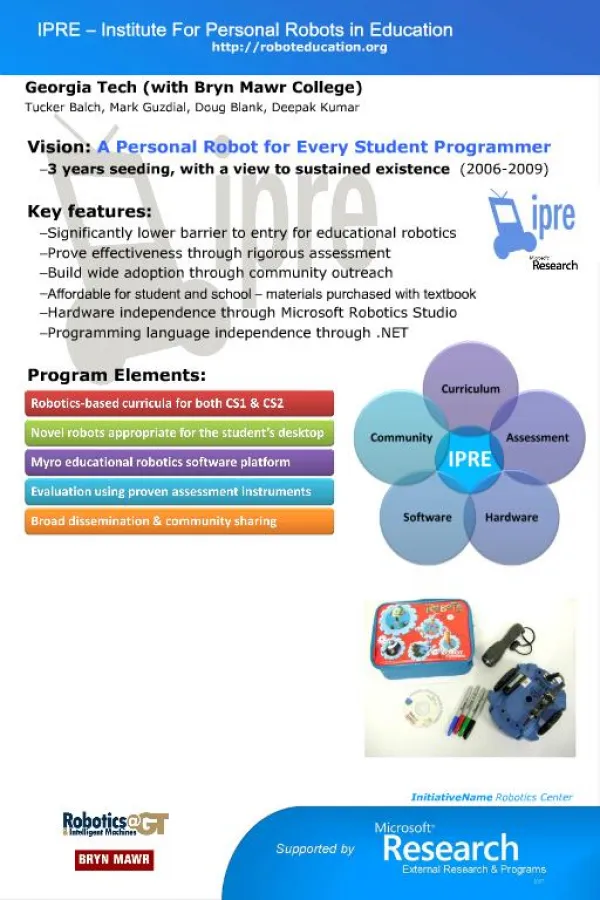
IPRE Introduction Robotics research consistently active, dynamic Meanwhile, a crisis in CS attraction & retention Isolated examples of robotics as a motivator, but hard to use, no standard, no proof to win greater support Perceived need: a concerted effort to scientifically study the effectiveness of robotics to teach CS1/CS2 Select invitation to host an initial 3-year research institute, awarded June 2006 to Georgia Tech with Bryn Mawr College, against tough competition Special ingredient and hypothesis: a personal robot for every student programmer
IPRE Mission • Make education more fun and effective through the use of personal robots. • Audience: All levels, from middle school to graduate school.
Who is IPRE? • GT: Tucker Balch, Mark Guzdial • Bryn Mawr: Doug Blank, Deepak Kumar • MSR: Stewart Tansley, Jared Jackson
Research Questions for CS1 • How does a robot-centric CS1 curriculum… • Affect students’ understanding of CS concepts? • Impact retention of students in CS? • Affect the diversity of students drawn to CS? • Which robots are appropriate for CS1? • How should the curriculum be structured? • How should the software be structured?
Background: Why Should this Work? • Georgia Tech CS1 in the 1990s: • 28% WDF rate, 50% for non-CS majors. • One solution: Context & Choice • Computational Media (Guzdial) • Engineering/Matlab (Smith) • Traditional Java-based CS1 • Impact: • WDF rate 16% for non-majors • 1 year later: 20% of non-major students report programming outside class • Students who move to CS major perform as well as “regular” CS students
Components of the Approach • A personal robot. • Approachable software/programming environment. • An engaging curriculum. • Quantitative assessment. • Philosophy: The curriculum drives the design of the robot, software, and text. • Engage the community.
Milestones/Timing • Summer 2006: Project begins. • Fall 2006: Robot/Curriculum/Software design. • Spring 2007: ~30 seat pilot courses taught at GT and BMC. • Fall 2007: Scale up to 150 seat course at GT. • Spring 2008: Rollout to University of Georgia and Georgia State. • Next steps: • Engage the community: web, workshops, outreach. • Develop support infrastructure: forums, people. • Roll out broadly.
A Robot for CS Education • Personal: Every student with her own robot. • No labs with expensive robots. • Instead: Inexpensive robots in the campus bookstore. • Reliable: No mystery regarding “does it work?” • Break the compile-download-run cycle. • Leverage the desktop. ?
IPRE “Pilot” Robot: $195 • 3 Light sensors • 2 IR sensors • 2 Line sensors • Stall sensor • Speaker • 3 LEDs • 2 motors • Bluetooth wireless
IPRE Pilot Robot v2: $120 • 256x192 color camera • Raw images (0.5 HZ) • On board color segmentation (6 HZ) • Battery voltage sensing • Very bright rear facing LED • I2C extension port • IR emitters and receiver • Obstacle/Wall detection • Inter-Robot Communication
Bryn Mawr College • Liberal arts college (near Philadelphia), founded in 1885 • 1200 undergraduate women, 400 graduate students (co-ed) • New program (estd. 2000) in CS offers Major in Computer Science (BA), Minor in CS, and Minor in Computational Methods • Takes a fresh approach to the design of CS curriculum
Myro SoftwareSample Program (Python) defmain(): whileTrue: Left, Right = getIR() ifLeft: turnRight(turnSpeed) elifRight: turnLeft(turnSpeed) else: forward(cruiseSpeed) # Avoiding Obstacles frommyroimport* initialize(ask(“What port?”)) # program settings... cruiseSpeed = 0.6 turnSpeed = 0.5
CS1 Text (Chapter Outline) • Chapter 1 The World of Robots • Chapter 2 Robots: Personal or Otherwise • Chapter 3 Building Brains • Chapter 4 Sensing the World • Chapter 5 Making Decisions • Chapter 6 Behaviors • Chapter 7 Control Paradigms • Chapter 8 Making Music • Chapter 9 Communication • Chapter 10 Computing & Computation • Chapter 11 Artificial Intelligence • Chapter 12 Robots in the World
Sample Assignment • Corral Exiting/EscapeImagine a corral (an enclosed area with maze like partitions and an entrance) with a light source at the entrance (as shown in the figure to the right). Given the robot's position, can we design a behavior that will enable the robot to exit the corral?
BMC Pilot Course – Spring 2007Some qualitative results • 24 students (22 women, 2 men) • Learned CS concepts through robots • Robots made learning experience more hands-on, tangible, and exciting • Most frustrating parts were dealing with robot hardware inconsistencies • Viewed CS as a type of logic and problem solving; requiring patience & thought • Discovered that CS and robots are applicable to the real world
BMC Pilot Course – Spring 2007Some (preliminary) results • Liked the use of personal robots • Did not like quirky issues with Scribblers • Learned programming and problem solving (as opposed to just robotics)
GT Pilot Course – Spring 2007Initial results • Two courses, one instructor: • 30 seat “traditional” Python-based course • 36 seat (30 male, 6 female) robot-centric course • Students felt that the course was focused on computer science, not on robotics. • The frustrations in the course were mostly about the robot: Under-featured, difficult to maintain. • No significant difference in success/failure rates from robotics vs. non-robotics sections.
Challenges at GT • Students only reported getting excited about the first assignment (to learn the robot – not much there) and the dancing assignment (as creative expression). • Students in the robot section reported talking about their class less than students in the non-robot section. • Creating more connections between lecture and assignment • Doing CS with robotics requires a new strategy, a new way of thinking about what we teach and how we teach it.
Next Steps • Software “Myro” implemented in .NET/Mono • Use IronPython, but be language agnostic • JavaScript, Ruby, Python, VB, C#, etc. • Use Dynamic Language Runtime (DLR) • Standardized interface across languages • Ability to work in a single framework • Simple IDE, simple graphics • Take advantage of Microsoft Robotics Studio • Explore hardware designs for the perfect personal robot for education
Adding Excitement… • Ability to draw • Ability to make music/tones • Ability to play sounds and talk • Ability to express • Ability for robot interaction • Ability to have a web presence
PowerPoint TemplateSubtitle color • Example of a slide with a subhead • Set the slide title in “Title Case” • Set subheads in “Sentence case” • Generally set subhead to 36pt or smaller so if will fit on a single line • The subhead color is defined for this template but must be selected; On the font color palette, select the color to the right of title color
IPRE: Bryn Mawr Perspective • Initiative to research pedagogical approaches using personal robots • Develop specifications for personal robots/devices • Develop a uniform framework of abstractions for controlling robots • Develop curricular materials • Field testing in several educational settings