Download
1 / 48
480 likes | 629 Views
Overview of Ensemble Forecasting. COMET Faculty 99 Course Presented by Steve Mullen Wednesday, 9 June 1999. Steven L. Mullen Univ. of Arizona. Benefactors. Dave Baumhefner , NCAR Joe Tribbia, NCAR Ron Errico, NCAR Tom Hamill, NCAR Harold Brooks, NSSL Chuck Doswell, NSSL

E N D
Overview of Ensemble Forecasting COMET Faculty 99 Course Presented by Steve Mullen Wednesday, 9 June 1999 Steven L. Mullen Univ. of Arizona
Benefactors • Dave Baumhefner, NCAR • Joe Tribbia, NCAR • Ron Errico, NCAR • Tom Hamill, NCAR • Harold Brooks, NSSL • Chuck Doswell, NSSL • Dave Stensrud, NSSL • Eugenia Kalnay, NCEP-UO-UM-? • Steve Tracton, NCEP • Zoltan Toth, NCEP • Ron Gelaro, NRL • Rolf Langland, NRL • Jeff Anderson, GFDL • Mike Harrison, UKMO • Tim Palmer, ECMWF • Roberto Buizza, ECMWF • Peter Houtekamer, AES
Presentation Overview • Philosophy and Benefits of Ensembles • Estimate of Initial Uncertainty • Design of Initial Perturbations for EPS • Inclusion of Model Uncertainty in EPS • Ensemble Size • Integration of EPS and Data Assim System • Model Validation • Evaluation and Utility of EPS • Classroom Activities
Philosophy and Benefitsof Ensemble Forecasting • Initial Condition Uncertainty (ICU) • Probability Density Function (PDF) of initial conditions about “Truth” • GOAL: predict evolution of PDF • Gives information on 1st & 2nd moments Forecast uncertainty from dispersion • Thought to be most applicable to MRF (6-10 day) and seasonal (30-90 day) forecasts • Beneficial to SRF (06 h-2 day) for QPF • KEY: IC error versus model error More skillful model, more beneficial PIC • Now includes dispersion from uncertainty in initial state and model formulations
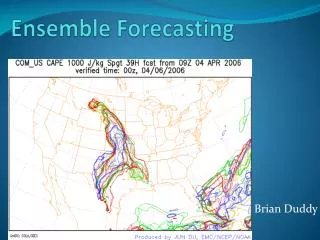
Precipitation Dispersion32 km NSSL Mixed EnsembleOct 97-Dec 97
Perturbation Design • What is the goal?1) Robust estimate of PDF?2) Sample extremes of PDF? 3) Make up for deficiency in EPS? • Requirements 1) Properly constrained by estimates of analysis error 2) Equally-likely probability for each perturbation field • What are some of the attributions of current perturbation schemes for global ensemble models?
Perturbation DesignConclusions • Perturbation methods control dispersion characteristics out to 5-7 days • SV: linear growth 1-3 days • Random: classic error growth curve • Random: project onto SVs 1-5 days • BV: unique, different than analysis error, but has improved with recent changes • Perturb strategy is unimportant after 5-7 days, once growth is strongly nonlinear
Model Uncertainties • Specification of Subgrid Scale Processes • GOAL: improve transient variability and increase ensemble dispersion • Methodologies / Philosophies 1) Fixed during model integration: different parameterization schemes change tunable parameters 2) Stochastic element during integration: to a scheme’s tunable parameters to model tendencies directly • What are some of the attributes?
Model Uncertainties Conclusions • Increases dispersion • Changes predictability estimates • Model validation issues?
Model Validation • Major Challenge for Mesoscale LAMs • Inclusion of stochastic dynamics/physics into model requires consideration of amplitude spatial scale temporal scale • Statistics for model and observations are currently lacking, so need for long-term model integrations better utilization of obs network in absence of obs statistics, validate by comparison with explicit models • GOAL: model PDFs match obs PDFs
Ensemble Size (N) • Increased N or finer model resolution • Partitioning N among perturbed IC’s and different physics parameterizations • Depend on model, forecast objective etc. • Choice is not always clear Resolution of complex terrain • Larger N always decreases sampling uncertainty Diminishing returns N exceeds 10-20 • N sets limits on resolution of PDF 1% event requires N of 200 or larger • Large N warranted for accurate EPS Model with good climate Ability to simulate phenomenon Sound perturbation strategy
EPS and Data Assimilation System • Current status of Data Assimilation 3DVAR and OI techniques homogeneous isotropic flow independent • Kalman filter and 4DVAR can account for these shortcomings Kalman filter expensive 4DVAR lacks cycling • Ensemble of perturbed 6h SRFs may provide an alternative to 4DVAR inexpensive contains cycling • Houtekamer and Mitchell (1998) study
Utility of EPS • Challenge: convey info in ensembles Reduce flow dimensionality clusters, EOFs, indices, envelopes User friendly and flexible wide spectrum of needs and abilities “problem of day” changes • Enhance utility by stat. post-processing MLR MOS-techniques Kalman filtering AI-neural networks • Rigorous assessment of stat. significance • Cost-benefit analysis
Fav SitesReal-Time Ensemble Products • NCEP MRF Ensembles CDC Boulderwww.cdc.noaa.gov/~map/maproom/ENS/ens.html NCEP Ensemble Homepage sgi62.wwb.noaa.gov:8080/ens/enshome.html Univ of Utahwww.met.utah.edu/jhorel/html/models/model_ens.html • MOS for MRF Ensembles Penn Statewww.essc.psu.edu/~rhart/ensemble/ensmos.html • Short-Range Mixed Ensembles NSSL/NOAA vicksburg.nssl.noaa.gov/mm5/ensemble/index_all.html • SAMEX? NCEP ETA/RSM? Ask Kelvin D. and Steve T., respectively!
Classroom ActivitiesAppropriate for Undergrads • Probabilistic Forecasting QPF Use MOS thresholds MAX-MIN Credible Interval Forecasts (e.g. Prob. within 2oF) Be willing to stumble and be humbled! • Hands-On NWP Barotropic Model Experiments