Download
1 / 22
220 likes | 318 Views
Presented by: Hui Fang (NTU) Co-authors: Wen-Jing Hsu (NTU) Larry Rudolph (MIT) . Cognitive Personal Positioning Based on Activity Map and Adaptive Particle Filter. Outline. Background and Motivation Personal Positioning My Research Focus Mining User Positional Log

E N D
Presented by: Hui Fang (NTU) Co-authors:Wen-Jing Hsu (NTU) Larry Rudolph (MIT) MSWiM 2009 Cognitive Personal Positioning Based on Activity Map and Adaptive Particle Filter
MSWiM 2009 Outline • Background and Motivation • Personal Positioning • My Research Focus • Mining User Positional Log • Map-guided Filter Positioning • My Conclusion
MSWiM 2009 Background and Motivation • Personal Positioning refers to the inference of a mobile user’s position and movement with sensors and historical data for wearable devices. • Challenges • Human behavior difficult to characterize • Sensor functions are limited ( power, accuracy) Cell Tower GPS Smart Phone
MSWiM 2009 Personal Historical Data 2008-01-23 19:51:46 CellID=(525, 5, 12, 51153) GPS=(1.34690833333333, 103.678925) 2008-01-23 19:53:06 CellID=(525, 5, 12, 13901) GPS=(1.34690833333333, 103.678925) 2008-01-23 19:55:46 CellID=(525, 5, 12, 51683) GPS=None 2008-01-23 19:55:51 CellID=(525, 5, 12, 51683) GPS=(1.34690833333333, 103.678925) 2008-01-23 19:55:56 CellID=(525, 5, 12, 51683) GPS=(1.34690833333333, 103.678925) • Disjoint traces are formed • Some traces get connected History repeats itself! Can we learn from these accumulating logs?
MSWiM 2009 Motivation and Application Scenarios • Smart device learns its owner’s movement from both logs and new measurement, and applies the knowledge to provide personalized location services to user. • Map learning, the process of transforming raw data into a suitable representation • Localization, the process of deriving the current position of the mobile user • Path planning, the process of predicting a future path given the current position
MSWiM 2009 My Research Focus • Mining Personal Historical Data • Identifying significant places • Identifying representative paths • Identifying user activity map • Map-guided Filter Positioning
MSWiM 2009 Identifying Significant Places • Dwelling time: average time staying at the place • Density: number of samples within the place • The number of significant places remains relatively invariant • SPs are identified as office, gym, residence, and playground etc.
MSWiM 2009 Identifying Representative Paths raw data PCM: Pair-wise Curve Merging Algorithm Compare every two traces, and merge similar segments in terms of their Hausdorff distance Repeat this until there is no more substitutions segmentation consolidation traces paths
MSWiM 2009 PCM: Pair-wise Curve Merging Algorithm • PCM algorithm runs in O(n2mlogm) time, where n is the number of traces and m the maximum length of traces • P΄ ,Q΄are the new curves obtained from P and Q respectively after executing subroutine merge(P,Q,ε). If the distance between P and Q is less thanε, then the distance between any two curves among {P,Q, P΄ ,Q΄} is less than ε • M = { Pi } is a set of traces, and V is the set of the trace vertices of M. If a path expansion U(Q, ε /2) covers all traces in M, then a polygonal curve P* can be constructed by a subset of V such that: • U(P*, ε ) covers all traces in M, and • | P* | ≤ |Q|
MSWiM 2009 User Activity Map • User activity map includes rich information rather than a 2D graph • Each vertex saves coordinates, radius, dwelling time, and density • Each edge saves average speed, number of traversals, and path width • User activity map provides an efficient basis for personal positioning
MSWiM 2009 My Research Focus • Mining User Positional Log • Map-guided Filter Positioning • Modeling on User Habit • Adaptive Sampling
MSWiM 2009 Positioning via Particle Filter • Motivation • Dealing with User Non-Linear Movements • Sampling on Map Branches to Improve Accuracy • System Formalization • User Habit Dynamics • Particle Weight Update
MSWiM 2009 Modeling User Dynamics • Observation • User tends to follow the same paths of activity map as before. • Position knowledge can be adjusted by new measurement. • Predict directions • When nearing an edge of the map, follow this edge • When nearing a vertex of the map, follow outgoing edges • E(x) defines a set of edges which indicate likely directions for a point x
MSWiM 2009 Modelling User Dynamics-II • Habit-guided prediction. • When nearing an edge e, user follows the edge direction with a tendency to return to the edge • G(x): x’s nearest point in the graph • A(x): distance vector from x to the graph • dot(x): speed samplings
MSWiM 2009 Modelling User Dynamics-III • When nearing a branching point v, sampling user positions on outgoing edges according to pdf(v) • xk-1: position at time step k-1 • v: xk-1nearest point in graph • e1, e2: v’s outgoing edges, with transition probability 0.3,0.7 respectively
MSWiM 2009 Stability of Map-Guided Dynamics System • System ConvergenceMap-guided filter positioning system converges to the user activity map for long run when b is negative. (Lemma 4.1) • Certainty Estimate • The confidence covariance can be obtained by Lemma 4.2
MSWiM 2009 Optimal Particle Weight Updating • Optimal solution chooses the proper importance density to minimize the variance of different weights. • Optimal importance density can be obtained by Lemma 4.3 • xk: actual position at step k • fk(xk-1i): prediction • zk: observation • qk, rk: radii of confidence ellipse • d: distance between observation and prediction wki = exp{ –d2/2(qk2+rk2)} wk-1i
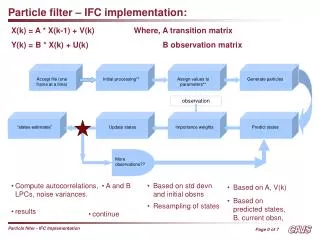
MSWiM 2009 Outline: Map-guided Filter Positioning Algorithm • User’s position is estimated by particles with weights • { (xi, w i): i = 1,..., Ns}, where i the index of particle • Generate particles from user dynamcis (prediction) • importance density p(xk|xk-1i), where k the time step • Update particles’ weight by observation zk (smoothing) • wki = p(zk|xki) wk-1i • Output the particle with maximum weight.
MSWiM 2009 Adaptive Map-Guided Filter Positioning • Variable number of particles is sampled around branching points • Let N1 be a minimum number of particles in use • For each time step: • If nearing an edge, set the number of particles to be N1 ; • Otherwise (i.e., nearing a branching point), set it to be N1* #(outgoing edges).
MSWiM 2009 Experiment of Personal Positioning • Particles sampled along a journey, within user activity map • User historical records
MSWiM 2009 My Conclusion I present • construction algorithm of user activity map that offers provable consistency guarantee • adaptive positioning model that guarantees optimal sampling and efficiency
MSWiM 2009 Thank You Q&A Hui FangNanyang Technological Universityhfang@ntu.edu.sg