Download
1 / 2
20 likes | 102 Views
Robea-ROBVOLINT project. Purpose of the Robea-ROBVOLINT project Allow a neophyte to control a unmanned aerial vehicle known as an X4-flyer from intuitive order issued from a simple joystick. Experimental vehicle

E N D
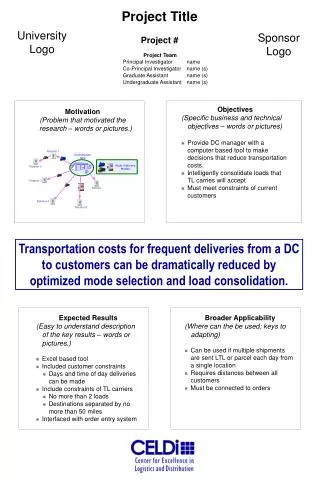
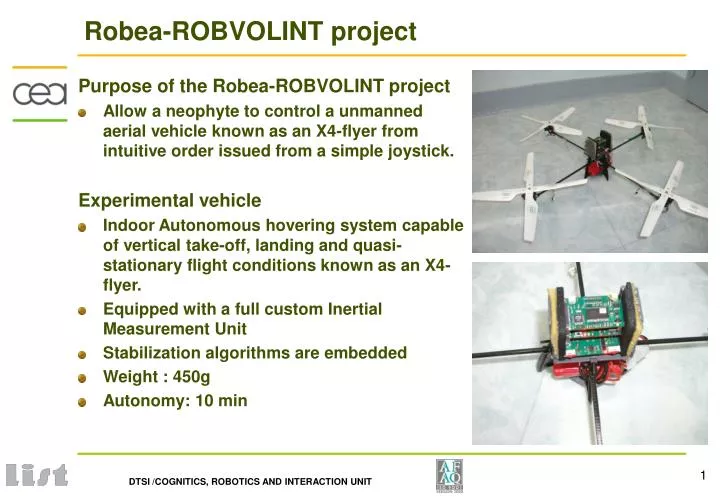
Robea-ROBVOLINT project Purpose of the Robea-ROBVOLINT project • Allow a neophyte to control a unmanned aerial vehicle known as an X4-flyer from intuitive order issued from a simple joystick. Experimental vehicle • Indoor Autonomous hovering system capable of vertical take-off, landing and quasi-stationary flight conditions known as an X4-flyer. • Equipped with a full custom Inertial Measurement Unit • Stabilization algorithms are embedded • Weight : 450g • Autonomy: 10 min
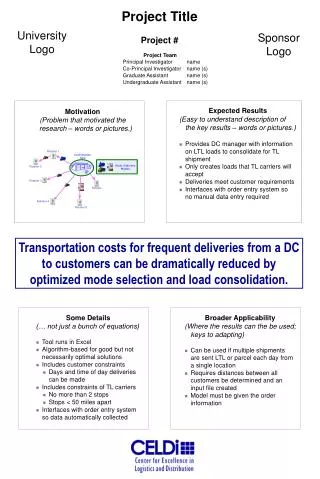
Algorithms development • A non linear algorithm that fuses data from rate gyros and accelerometers which gives drift free attitude estimates. • An original nonlinear control law which allow to remotely control the vehicle without difficulty. • Algorithms validation • Simulations on MATLAB/SIMULINK • Experimentation with the experimental vehicle.