Download
1 / 42
420 likes | 524 Views
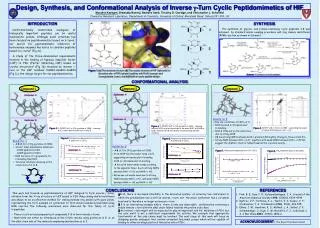
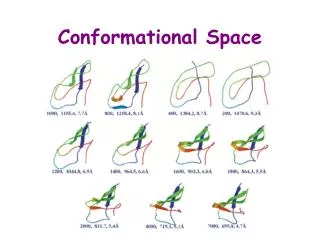
Conformational Space of a Flexible Protein Loop. Jean-Claude Latombe Computer Science Department Stanford University (Joint work with Ankur Dhanik 1 , Guanfeng Liu 2 , Itay Lotan 3 , Henry van den Bedem 4 , Jim Milgram 5 , Nathan Marz 6 , and Charles Kou 6 ). 1 Graduate student 2 Postdoc

E N D
Conformational Space of a Flexible Protein Loop Jean-Claude Latombe Computer Science DepartmentStanford University (Joint work with Ankur Dhanik1, Guanfeng Liu2, Itay Lotan3, Henry van den Bedem4, Jim Milgram5, Nathan Marz6, and Charles Kou6) 1 Graduate student 2 Postdoc 3 Now a postdoc at U.C. Berkeley4 Joint Center for Structural Genomics, Stanford Linear Accelerator Center 5 Department of Mathematics, Stanford University 6 Undergraduate CS students
Initial Project “Noise” in electron density maps from X-ray crystallography 4-20 aa fragments unresolved by existing software (RESOLVE, TEXTAL, ARP, MAID) Model completion is high-throughput bottleneck
Fragment Completion Problem • Input: • Electron-density map • Partial structure • Two “anchor” residues • Amino-acid sequence of missing fragment • Output: • Conformations of fragment that • Respect the closure constraint (IK) • Maximize match with electron-density map
Two-Stage Method[H. van den Bedem, I. Lotan, J.C. Latombe and A. M. Deacon. Real-space protein-model completion: An inverse-kinematics approach. Acta Crystallographica, D61:2-13, 2005.] • Candidate generations Closed fragments • Candidate refinement Optimize fit with EDM
Stage 1: Candidate Generation Loop: • Generate random conformation of fragment (only one end is at its “anchor”) • Close fragment – i.e., bring other end to second anchor – using Cyclic Coordinate Descent (CCD)[A.A. Canutescu and R.L. Dunbrack Jr. Cyclic coordinate descent: A robotics algorithm for protein loop closure. Prot. Sci. 12:963–972, 2003]
dq3 dq2 (q1,q2,q3) dq1 Stage 2: Candidate Refinement • Target function T(Q)measuring quality of the fit with the EDM • Minimize T while retaining closure Null space
Refinement Procedure Repeat until minimum is reached: • Compute a basis N of the null space at current Q (using SVD of Jacobian matrix) • Compute gradient T of target function at current Q [Abe et al., Comput. Chem., 1984] • Move by small increment along projection of T into null space (i.e., along dQ = NNT T) + Monte Carlo + simulated annealing protocol to deal with local minima
Tests #1: Artificial Gaps • Complete structures (gold standard) resolved with EDM at 1.6Å resolution • Compute EDM at 2, 2.5, and 2.8Å resolution • Remove fragments and rebuild Short Fragments: 100% < 1.0Å aaRMSD Long Fragments: 12: 96% < 1.0Å aaRMSD 15: 88% < 1.0Å aaRMSD
Tests #2: True Gaps • Structure computed by RESOLVE • Gaps completed independently (gold standard) • Example: TM1742 (271 residues) • 2.4Å resolution; 5 gaps left by RESOLVE Produced by H. van den Bedem
TM1621 • Green: manually completed conformation • Blue: conformation computed by stage 1 • Pink: conformation computed by stage 2 • The aaRMSD improved by 2.4Å to 0.31Å
A A323 Hist A316 Ser B Two-State Loop • TM0755: data at 1.8Å • 8-residue fragment crystallized in 2 conformations • the EDM is difficult to interpret • Generate 2 conformations Q1 and Q2 using CCD • TH-EDM(Q1,Q2,a) = theoretical EDM created by distribution aQ1 + (1-a)Q2 • Maximize fit of TH-EDM(Q1,Q2,a) with experimental EDM by moving in null space N(Q1)N(Q2)[0,1]
Status • Software running with Xsolve, JCSG’s structure-solution software suite • Used by crystallographers at JCSG for structure determination • Contributed to determining several structures recently deposited in PDB
Lesson • “Fuzziness” in EDM due to loop motion is not “noise” • Instead, it may be exploited to extract information on loop mobility
New 4-year NSF project (DMS-0443939,Bio-Math program) • Goal:Create a representation (probabilistic roadmap) of the conformation space of a protein loop, with a probabilistic distribution over this representation • Applications: • Motion from X-ray crystallography • Improvement of homology methods • Predicting loop motion for drug design • Conformation tweaking (MC optimization, decoy generation)
Predicting Loop Motion [J. Cortés, T. Siméon, M. Renaud-Siméon, and V. Tran. J. Comp. Chemistry, 25:956-967, 2004]
Ongoing Work • Develop software tools to create and manipulate loop conformations • Study the topological structure of a loop conformational space
Software tools implemented • CCD • Exact IK for 3 residues (non-necessarily contiguous) Creation of loop conformations
Exact IK for 3 Residues[E.A. Coutsias, C. Seok, M.J. Jacobson, K.A. Dill. A Kinematic View of Loop Closure, J. Comp. Chemistry, 25(4):510 – 528, 2004] Maximal number of solutions: 10, 12?
Software tools implemented • CCD • Exact IK for 3 residues (non-necessarily contiguous) Creation of loop conformations • Computation of pseudo-inverse of Jacobian and null-space basis Loop deformation in null space Conformation sampling
Software tools implemented • CCD • Exact IK for 3 residues (non-necessarily contiguous) Creation of loop conformations • Computation of pseudo-inverse of Jacobian and null-space basis Loop deformation in null space Conformation sampling • Detection of steric clashes (grid method)
Topological Structure of Conformational Space • Inspired by work of Trinkle and Milgram on closed-loop kinematic chains • Leads to studying singularities of open protein chains and of their images
Configuration Space of a 4R Closed-Loop Chain l3 Rigid link l4 l2 l1 Revolute joint [J.C. Trinkle and R.J. Milgram, Complete Path Planning for Closed Kinematic Chains with Spherical Joints, Int. J. of Robotics Research, 21(9):773-789, 2002]
Configuration Space of a 4R Closed-Loop Chain l3 l4 l2 l1 [J.C. Trinkle and R.J. Milgram, Complete Path Planning for Closed Kinematic Chains with Spherical Joints, Int. J. of Robotics Research, 21(9):773-789, 2002]
Images of the singularities of the red linkage’s endpoint map: C 2 Configuration Space of a 4R Closed-Loop Chain [J.C. Trinkle and R.J. Milgram, Complete Path Planning for Closed Kinematic Chains with Spherical Joints, Int. J. of Robotics Research, 21(9):773-789, 2002]
Configuration Space of a 4R Closed-Loop Chain l1 [J.C. Trinkle and R.J. Milgram, Complete Path Planning for Closed Kinematic Chains with Spherical Joints, Int. J. of Robotics Research, 21(9):773-789, 2002]
Configuration Space of a 4R Closed-Loop Chain l1 [J.C. Trinkle and R.J. Milgram, Complete Path Planning for Closed Kinematic Chains with Spherical Joints, Int. J. of Robotics Research, 21(9):773-789, 2002]
Images of the singularities of the red linkage’s endpoint map: C 2 S1|S1 IS1 S1|S1 I(S1S1) Configuration Space of a 5R Closed-Loop Chain [J.C. Trinkle and R.J. Milgram, Complete Path Planning for Closed Kinematic Chains with Spherical Joints, Int. J. of Robotics Research, 21(9):773-789, 2002]
C N Ca N How does it apply to a protein loop?
C N Ca N How does it apply to a protein loop?
C N Ca N How does it apply to a protein loop?
C N Ca N Images of the singularities of the red linkage map: C 3SO(3) 2D surfacein3SO(3)
N Ca C Kinematic Model ~60dg
Singularities of Map C R3 • Rank 1 singularities: Planar linkage • Rank 2 singularities: • Type 1 • Type 2
Planar sub-linkages Line contained in P0 P0 Singularities of Map C R3 • Rank 1 singularities: Planar linkage • Rank 2 singularities: • Type 1 • Type 2
Endpoint iscontained in all planes P0, P1, and P2 L There is a line L contained in P2 to which P0 and P1 are // Must be // to each other and // to last plane Singularities of Map C R3 • Rank 1 singularities: Planar linkage • Rank 2 singularities: • Type 1 • Type 2 P2 P1 P0
Images of Singularities rank 1 singularity Singularities are on the periphery of the endpoint’s reachable space