Download
1 / 22
240 likes | 413 Views
This study discusses state observers for linear systems, including conventional asymptotic observers and reduced-order Luenberger observers. It also covers sliding mode observers, adaptive Kalman filters, and estimation of disturbances in time-varying systems. The design and simulations of these observers are highlighted, showing their effectiveness in parameter estimation and convergence. The application of various observer equations is demonstrated, considering both known and unknown system parameters.

E N D
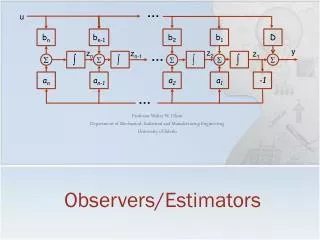
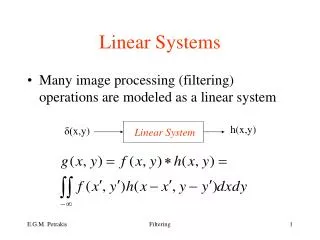
State Observers for Linear Systems Conventional Asymptotic Observers Observer equation Any desired spectrum of A+LC can be assigned Reduced order observer
Sliding mode State Observer Mismatch equation Reduced order Luenberger observer
Sliding mode State Observer Mismatch equation Reduced order Luenberger observer Variance Kalman filter without adaptation S.M. filter without adaptation Adaptive Kalman filter Noise intensity
Observers for Time-varying Systems Block-Observable Form Ai,i+1, y=yo. . . . . . . .
Time-varying Systems with disturbances The last equation with respect to yrdepends on disturbance vector f(t), thenvr,eqis equal to the disturbance. Simulation results: T Disturbances Estimates of Disturbances
The Example Obswerver The observer is governed by the equations
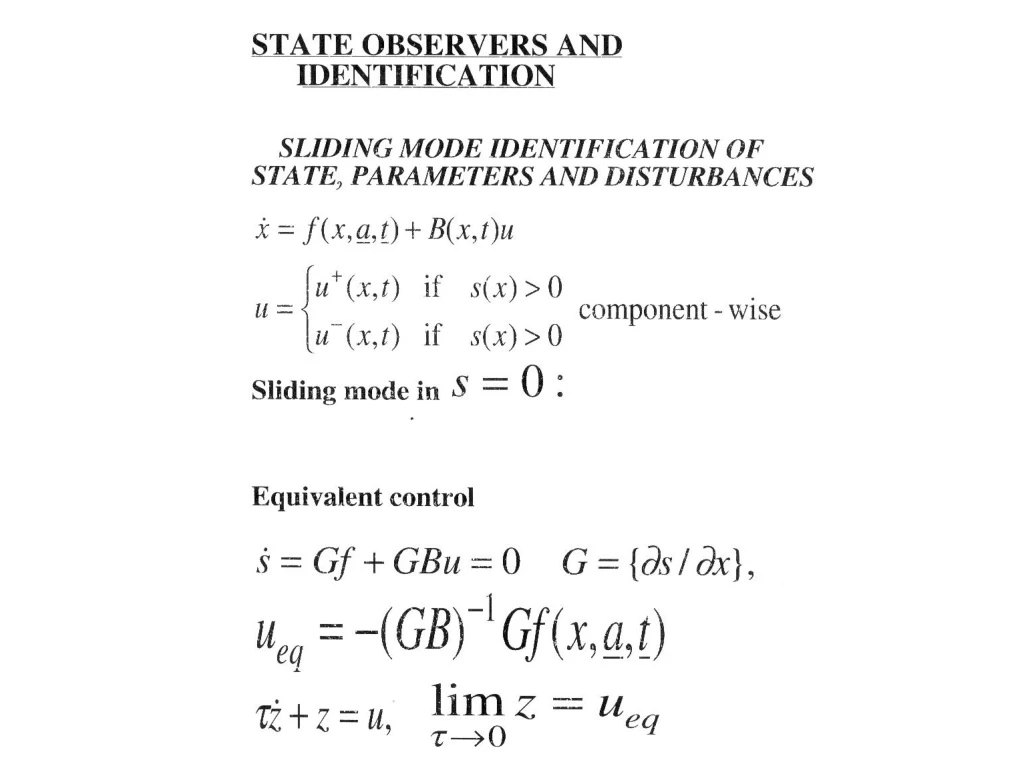
Parameter estimation Sliding mode estimator Lyapunov function finite time convergence to
Sliiding mode estimator with finite timeconvergence of to zero Linear operator
Example of operator Application: Linear system with unknown parameters X is known, A can be found, if component of X are linearly independent, as components of vector
DIFFERENTIATORS The first-order system z x + f(t) u - Low pass filter The second-order system v u x + - + f(t) - s Second-order sliding mode uis continuous, low-pass filter is not needed.