Download
1 / 31
310 likes | 539 Views
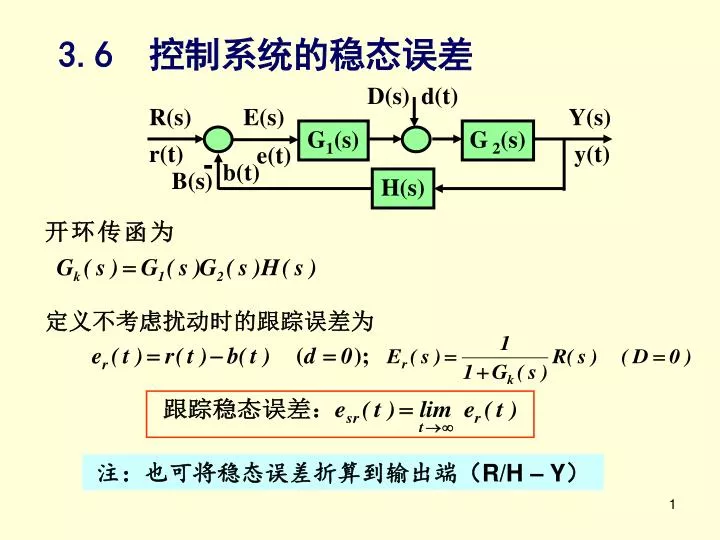
D(s). d(t). Y(s). R(s). E(s). G 1 (s). G 2 (s). r(t). y(t). e(t). -. b(t). B(s). H(s). 3.6 控制系统的稳态误差. 注:也可将稳态误差折算到输出端( R/H – Y ). D(s). d(t). Y(s). R(s). E(s). G 1 (s). G 2 (s). r(t). y(t). e(t). -. H(s). 注:也可将稳态误差换算到输入端( E d = – HY ). R(s). Y(s). E r (s).

E N D
D(s) d(t) Y(s) R(s) E(s) G1(s) G 2(s) r(t) y(t) e(t) - b(t) B(s) H(s) 3.6 控制系统的稳态误差 注:也可将稳态误差折算到输出端(R/H – Y)
D(s) d(t) Y(s) R(s) E(s) G1(s) G 2(s) r(t) y(t) e(t) - H(s) 注:也可将稳态误差换算到输入端(Ed = – HY)
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 1. 跟踪稳态误差 • 跟踪稳态误差为零的条件为 • 闭环系统稳定(Δ=a+b 的根具有负实部) • 开环传函Gk包含与参考输入R相同的不稳定极点 第二个条件称为内模原理(Internal Model Principle)
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 说明 • 满足内模原理通常要依靠控制器,而不是受控对象或检测环节,因为受控对象是给定的,没有设计余地,而检测环节一般都稳定,且通常为比例或带惯性的比例环节; • 只要系统满足内模原理和闭环稳定的条件,即使系统存在模型误差,或实际系统的参数发生变化,也能保证稳态误差为零; • 实际系统即使满足内模原理,esr=0,但检测环节或给定信号不准确时,系统仍会有稳态误差;另外,各种随机扰动、非线性因素等也会造成稳态误差。
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 内模原理的特例:R(s)为典型输入信号 闭环系统稳定时跟踪稳态误差为零的条件: 若 R=1/s ,则Gk应包含1个积分环节(1型系统); 若 R=1/s2,则Gk应包含2个积分环节(2型系统) ; 若 R=1/sn,则Gk应包含n个积分环节(n型系统) ; 注:积分环节过多不利于稳定性和暂态性能见下页 不满足内模原理时如何求稳态误差? ① 根据终值定理 ② 对误差函数进行分式分解
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) j 稳定区域 不稳定区域 0 s复平面 应用终值定理分析稳态误差 终值定理主要用于不满足内模原理、且R为典型输入(极点在原点)时求系统的稳态误差。不属于这种情况则可采用误差函数的分式分解法。
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 仿真: ac3no8-10
单位阶跃响应曲线 r(t) y(t) 稳态误差为零 time
单位斜坡响应曲线 0.25 r(t) y(t) time
单位抛物线响应曲线 er(t)→∞ r(t) y(t) time
不同G2时的单位阶跃响应曲线 r(t) y(t) 稳态误差都为零 time
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 系统的类型与误差系数 设闭环系统 稳定,下同
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s)
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s)
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) × × × × 0 × × 误差函数的分式分解法: E2(s)的极点只有三种情况:①虚轴以右,②原点, ③原点以外的虚轴上。 对于①,显然有 esr=∞; 对于②,也可利用终值定理求; 对于③,esr 为等幅振荡的正弦型函数 注:分式分解法主要用于情况③
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 暂态 稳态
R(s) Y(s) Er(s) G 2(s) G1(s) - H(s) 注意 • 对于有时滞的系统,误差函数的分式分解较为麻烦。 虽然可以分解出 (b1s+b0)/(s2+1) 项, 但远不如用后面的频率分析法方便。
D(s) R(s) Y(s) G 2(s) G1(s) - H(s) 2. 扰动稳态误差 • 设G2的零点与D的不稳定极点互异,则扰动稳态误差为零的条件为 • 闭环系统稳定(Δ=a+b 的根具有负实部) • G1H包含与扰动输入D相同的不稳定极点(内模原理) 注:由于H一般稳定,∴内模原理通常指G1
D(s) R(s) Y(s) E(s) G 2(s) G1(s) - H(s) 按扰动稳态误差折算到输入端分析: • 设G2与H的零点与D的不稳定极点互异,则扰动稳态误差为零的条件为 • 闭环系统稳定(Δ=a+b 的根具有负实部) • G1包含与扰动输入D相同的不稳定极点(内模原理)
D(s) R(s) Y(s) E(s) G 2(s) G1(s) - H(s) D(s)为典型输入信号时扰动稳态误差为零的条件: • 若 D=1/s ,则G1应包含1个积分环节(1型系统); • 若 D=1/s2,则G1应包含2个积分环节(2型系统); • 若 D=1/sn,则G1应包含n个积分环节(n型系统); 注意:针对扰动与针对参考输入,系统 “型”的定义不同 稳态误差不为零时,可由终值定理求: 不满足前提条件时可采用误差函数的分式分解法。
D(s) R(s) Y(s) G 2(s) G1(s) - H(s)
Simulink仿真结构图 仿真:ac3no11
仿真结果 稳态误差都为零 y(t) r(t) d(t) time
不同G2时的仿真结果 y(t) d(t) r(t) 稳态误差仍为零 time
D(s) R(s) Y(s) G 2(s) G1(s) - H(s) (仅扰动不同,其余同前例) (闭环极点为-1.4092 , -0.3281, -0.1313 ± 1.0315j) ki 决定暂态响应性能
Simulink仿真结构图 仿真:ac3no19
仿真结果 r(t) y(t) d(t) 稳态误差都为零
实验2:二、三阶系统性能分析(3学时) • 联系:李亚力老师 • 电气信息学院专业实验楼403 • 85466288→8216, • 13330961802
练习 • B3.34 (a), B3.39 , B3.41