Download
1 / 21
230 likes | 475 Views
2011 Fall senior design. Navigation System of Autonomous Vehicle. Presentation. 2012 Apr. 17 th. Team member: Jia Huang, Taoran Yan, Yuezhang Zhou, Yumeng Wang Advisor: Prof. Narasimhamurthi Natarajan , Prof. John Miller. Description. Project Description. Description.

E N D
2011 Fall senior design Navigation System of Autonomous Vehicle Presentation 2012 Apr. 17th Team member: Jia Huang, Taoran Yan, Yuezhang Zhou, Yumeng Wang Advisor: Prof. NarasimhamurthiNatarajan,Prof. John Miller
Description Project Description
Description Requirement Technically, the project mainly concentrates on designing an autonomous vehicle navigation and control system. At the same time, the robot vehicle should take safety into consideration. Design Requirements • Autonomous ,unmanned and not remotely controlled • Capable of working on paths with different shapes • Good navigation accuracy • Good efficiency of time and work • Minimized power assumption • Reasonable consideration on safety of the system
Description Technical Specification
Circuit Design • Emergency Stop Design • Autonomous Control • Manual Control Sub-systems • Navigation system • Power system • Control system • Vision system • Wheel encoder • Sonar sensor
Design Design Criteria • Navigation Accuracy • Maximum Speed • Emergency Stop • Maximum Mass • Minimum error • Minimum turning radius • Length of the vehicle Within 6in 4m/s Within 30cm 310lbs 0.84% Zero Within 2m
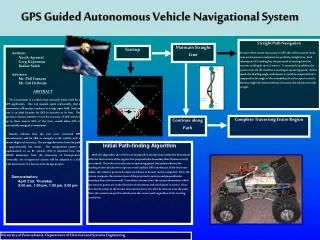
Odometry: • Distance tracking • Making 90 degree turns • Sonar Senor: • Position monitor • Stop • Design Details • Vision navigation: • Orange cones every 0.5 meter • OpenCV library applied for image processing • Hough transform used to locate the center of the path • Primary Strategy • Secondary Strategy Navigation System
Design Details Vision Strategy —Hough Transform • Acquire • an image Two point forms a line (Hough Transform) Color extraction and thresholding.
Design Details Vision Strategy —Hough Transform Locatethetarget Generate the regression line
Design Details Vision Strategy —one line navigation If for any reasons, one of the lines cannot be seen, then the target is located using the width of the lane. The program dynamically estimates the width using long term average of the width.
Design Details Vision Strategy —regression line Error in Hough line and regression line
Design Details Turning Method Odometry: - Use the pre-measured number of clicks for turning. - A zero turning radius is feasible. Vision: - Use distinct color cones to set turning warning. - Only if target point fall into the setting range, regarded as turning done. Otherwise, keep turning. - A good method for turning on slippery floor.
Design Details Secondary Strategy Odometry: L θ r L = θ ∙ r 19575 clicks (pulses) are needed.
Design Details Stop Method • Vision: • - Use different color cones to stop.(blue cone) • - When the weight of blue in the image is greater than the orange weight, the vehicle should stop. Odometry: - Based on the testing data, numbers of clicks for 10 meters or 20 meters are known. Sonar sensor: - Tested on model robot, the robot stops when obstacle detected, with 1-inch resolution.
Design Details Secondary Strategy • Sonar Distance Detection LV-MaxSonar-EZ1 paired with PIC microprocessor Detection range:6 ~ 254 inches (1-inch resolution) A/D Conversion • LCD Display Paired with Port Expander SPI communication • Buzzer Ring Timer Interrupt Check PWM function
Design Details Control Initial vision Get image Send request to leftQSB Initial encoder Locate beacon Get counts Hough lines Image processing Send request to rightQSB Regression line Odometry Get counts Control Locate target
Design Details • Two emergency shut off switches: • Red physical E-stop located at the back • Main power supply shutoff power to motors • Immediate response to E-Stop • Wheels totally locked after E-Stop; stopping distance depending on the friction of road, no more than 30cm • Wireless shut off switch • Remote car locking unit used with self-latching relay logic circuit to shut off power to all devices • Recycle power to release E-Stop • Same response as physical E-Stop Working mode Manual Estop Wireless Estop open open open Closed in moment Emergency stop
Test & Result Before image processing, the camera speed is 30 frames/second After doing Hough Transform, the speed is decreasing to about 20 frames/second. • Camera speed test • Odometry test • E-stop test The vehicle forwards 10 meters for several times getting an average click, which serves for calculation of 90 degrees turn. The click of left wheel and the right wheel is 19038.6/m and 18891.3/m. Stop distance: the vehicle can stop on the cement ground within 30cm. Wireless range: the vehicle can be stopped by wireless E-stop within 30m.
Acknowledgement • Intelligent System Club • Material supply; • ION’s Satellite Division • Competition experience; • Prof. NattuNatarajan • Technical guidance; • Prof. John Miller • Many suggestions; • Xi Xie, Benjamin Craig • Personal helps;
Thanks Any Questions?