Download
1 / 25
310 likes | 670 Views
Ch 9.1: The Phase Plane: Linear Systems. There are many differential equations, especially nonlinear ones, that are not susceptible to analytical solution in any reasonably convenient manner. Numerical methods provide one means of dealing with these equations.

E N D
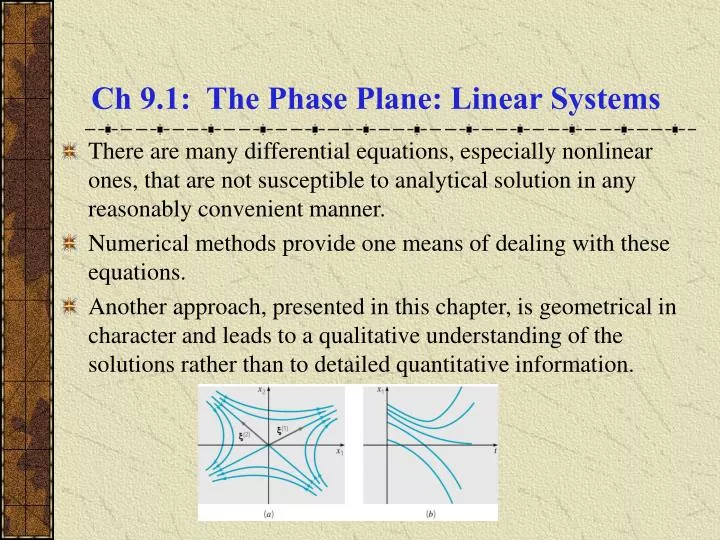
Ch 9.1: The Phase Plane: Linear Systems • There are many differential equations, especially nonlinear ones, that are not susceptible to analytical solution in any reasonably convenient manner. • Numerical methods provide one means of dealing with these equations. • Another approach, presented in this chapter, is geometrical in character and leads to a qualitative understanding of the solutions rather than to detailed quantitative information.
Solutions of Second Order Linear Systems • Consider a second order linear homogeneous system with constant coefficients of the form x' = Ax, where A is a 2 x 2 constant matrix and x is a 2 x 1 vector. • Recall from Chapter 7 that if we assume x = ert, then • Therefore x = ert is a solution of x' = Ax provided that r is an eigenvalue and is an eigenvector of the coefficient matrix A. • The eigenvalues are the roots of the polynomial equation det(A-rI) = 0, and the eigenvectors are determined up to an arbitrary constant from the equation (A-rI) = 0.
Equilibrium Solution, Phase Portrait • Solutions x for which Ax = 0 correspond to equilibrium solutions, and are called critical points. • We assume A is nonsingular, or detA 0, and hence x = 0 is the only critical point for the system x' = Ax. • A solution of x' = Ax is a vector function x = (t) that satisfies the differential equation, and can be viewed as a parametric representation for a curve in the x1 x2-plane. • This curve can be regarded as a trajectory traversed by a moving particle whose velocity dx/dt is specified by the differential equation. • The x1x2-plane is called the phase plane, and a representative set of trajectories is a phase portrait.
Characterizing Equation by Trajectory Pattern • In analyzing the system x' = Ax, we must consider several cases, depending on the nature of the eigenvalues of A. • These cases also occurred in Sections 7.5 – 7.8, where we were primarily interested in finding a convenient formula for the general solution. • Now our main goal is to characterize the differential equation according to the geometric pattern formed by its trajectories. • In each case we discuss the behavior of the trajectories in general an illustrate it with an example. • It is important to become familiar with the types of behavior that the trajectories have for each case, as they are the basic ingredients of the qualitative theory of differential equations.
Case 1: Real Unequal Eigenvaluesof the Same Sign (1 of 3) • When the eigenvalues r1 and r2are both positive or both negative, the general solution forx' = Ax is • Suppose first that r1 < r2 < 0, and that the eigenvectors (1)and (2)are as shown below. • It follows that x 0 as t for all solutions x, regardless of the values of c1 and c2.
Case 1: Nodal Sink (2 of 3) • If the solution starts at an initial point on the line through (1), then c2 = 0 and the solution remains on this line for all t. • Similarly if the initial point is on the line through (2). • The solution can be rewritten as • Since r1 - r2 < 0, for c2 0 the term c1(1)e(r1 - r2)t is negligible compared to c2(2),for large t. • Thus all solutions are tangent to (2)at the critical point x= 0 except for solutions that start exactly on the line through (1). • This type of critical point is called a node or nodal sink.
Case 1: Nodal Source (3 of 3) • The phase portrait along with several graphs of x1 versus t are given below. The behavior of x2 versus t is similar. • If 0 < r2 < r1, then the trajectories will have the same pattern as in figure (a) below, but the direction will be away from the critical point at the origin. In this case the critical point is again called a node or a nodal source.
Case 2: Real Eigenvaluesof Opposite Sign (1 of 3) • Suppose now that r1 > 0 and r2 < 0, with general solution and corresponding eigenvectors (1)and (2)as shown below. • If the solution starts at an initial point on the line through (1), then c2 = 0 and the solution remains on this line for all t. Also, since r1 > 0, it follows that ||x|| as t . • Similarly if the initial point is on the line through (2), then||x|| 0 as t since r2 < 0. • Solutions starting at other initial points have trajectories as shown.
Case 2: Saddle Point (2 of 3) • For our general solution the positive exponential term is dominant for large t, so all solutions approach infinity asymptotic to the line determined by the eigenvector (1) corresponding to r1 > 0. • The only solutions that approach the critical point at the origin are those that start on the line determined by (2). • This type of critical point is called a saddle point.
Case 2: Graphs of x1 versus t(3 of 3) • The phase portrait along with several graphs of x1 versus t are given below. • For certain initial conditions, the positive exponential term is absent from the solution, so x1 0 as t . • For all other initial conditions the positive exponential term eventually dominates and causes x1to become unbounded. • The behavior of x2 versus t is similar.
Case 3: Equal Eigenvalues (1 of 5) • Suppose now that r1 = r2 = r. We consider the case in which the repeated eigenvalue r is negative. If r is positive, then the trajectories are similar but direction of motion is reversed. • There are two subcases, depending on whether r has two linearly independent eigenvectors or only one. • If the two eigenvectors (1)and (2)are linearly independent, then the general solution is • The ratio x2/x1 is independent of t, but depends on the components of (1)and (2)and on c1and c2. • A phase portrait is given on the next slide.
Case 3: Star Node (2 of 5) • The general solution is • Thus every trajectory lies on a line through the origin, as seen in the phase portrait below. Several graphs of x1 versus t are given below as well, with the case of x2 versus t similar. • The critical point at the origin is called a proper node, or a star point.
Case 3: Equal Eigenvalues (3 of 5) • If the repeated eigenvalue r has only one linearly independent eigenvector , then from Section 7.8 the general solution is • For large t, the dominant term is c2tert. Thus every trajectory approaches origin tangent to line through the eigenvector . • Similarly, for large negative t the dominant term is again c2tert, and hence every trajectory is asymptotic to a line parallel to the eigenvector . • The orientation of the trajectories depends on the relative positions of and , as we will see.
Case 3: Improper Node (4 of 5) • We can rewrite the general solution as • Note that y determines the direction of x, whereas the scalar quantity ert affects only the magnitude of x. • For fixed values of c1and c2, the expression for y is a vector equation of line through the point c1 + c2 and parallel to . • Using this fact, solution trajectories can be sketched for given coefficients c1and c2. See phase portrait below. • When a double eigenvalue has only one linearly independent eigenvalue, the critical point is called an improper or degenerate node.
Case 3: Phase Portraits (5 of 5) • The phase portrait is given in figure (a) along with several graphs of x1 versus t are given below in figure (b). • When the relative orientation of and are reversed, the phase portrait given in figure (c) is obtained.
Case 4: Complex Eigenvalues (1 of 5) • Suppose the eigenvalues are i, where and are real, with 0 and > 0. • It is possible to write down the general solution in terms of eigenvalues and eigenvectors, as shown in Section 7.6. • However, we proceed in a different way here. • Systems having eigenvalues i are typified by • We introduce the polar coordinates r, given by
Case 4: Polar Equations (2 of 5) • Differentiating the polar equations with respect to t, we have or • Substituting into these derivative equations, we obtain
Case 4: Spiral Point (3 of 5) • Solving the differential equations we have • These equations are parametric equations in polar coordinates of the solution trajectories to our system x' = Ax. • Since > 0, it follows that decreases as t increases, so the direction of motion on a trajectory is clockwise. • If < 0, then r 0 as t , while r if > 0. • Thus the trajectories are spirals, which approach or recede from the origin depending on the sign of , and the critical point is called a spiral point in this case.
Case 4: Phase Portraits (4 of 5) • The phase portrait along with several graphs of x1 versus t are given below. • Frequently the terms spiral sink and spiral source are used to refer to spiral points whose trajectories approach, or depart from, the critical point.
Case 4: General System (5 of 5) • It can be shown that for any system with complex eigenvalues i, where 0, the trajectories are always spirals. • They are directed inward or outward, respectively, depending on whether is negative or positive. • The spirals may be elongated and skewed with respect to the coordinate axes, and the direction may be either clockwise or counterclockwise. See text for more details.
Case 5: Pure Imaginary Eigenvalues (1 of 2) • Suppose the eigenvalues are i, where = 0 and real. • Systems having eigenvalues i are typified by • As in Case 4, using polar coordinates r, leads to • The trajectories are circles with center at the origin, which are traversed clockwise if > 0 and counterclockwise if < 0. • A complete circuit about the origin occurs in a time interval of length 2 /, so all solutions are periodic with period 2 /. • The critical point is called a center.
Case 5: Phase Portraits (2 of 2) • In general, when the eigenvalues are pure imaginary, it is possible to show that the trajectories are ellipses centered at the origin. • The phase portrait along with several graphs of x1 versus t are given below.
Behavior of Individual Trajectories • As t , each trajectory does one of the following: • approaches infinity; • approaches the critical point x = 0; • repeatedly traverses a closed curve, corresponding to a periodic solution, that surrounds the critical point. • The trajectories never intersect, and exactly one trajectory passes through each point (x0, y0) in the phase plane. • The only solution passing through the origin is x = 0. Other solutions may approach (0, 0), but never reach it.
Behavior of Trajectory Sets • As t , one of the following cases holds: • All trajectories approach the critical point x = 0. This is the case when the eigenvalues are real and negative or complex with negative real part. The origin is either a nodal or spiral sink. • All trajectories remain bounded but do not approach the origin, and occurs when eigenvalues are pure imaginary. The origin is a center. • Some trajectories, and possibly all trajectories except x = 0, tend to infinity. This occurs when at least one of the eigenvalues is positive or has a positive real part. The origin is a nodal source, a spiral source, or a saddle point.
Summary Table • The following table summarizes the information we have derived about our 2 x 2 system x' = Ax, as well as the stability of the equilibrium solution x = 0.