Download
1 / 52
520 likes | 760 Views
Building competitive manipulators: Steps to successful design robot. Greg Needel Mechanical Engineer Black & Decker. Introduction. What is a manipulator? Active robot mechanisms (non drive train) The robot part that interacts with game pieces Kinds of Manipulators Latches Arms Grippers

E N D
Building competitive manipulators:Steps to successful design robot Greg Needel Mechanical Engineer Black & Decker
Introduction • What is a manipulator? • Active robot mechanisms (non drive train) • The robot part that interacts with game pieces • Kinds of Manipulators • Latches • Arms • Grippers • Shooters
Strategize. • Read the rules • Outline the game objectives • Choose your desired game strategy • Look for “Gimme” robot designs • Try small simulations. • Determine points (max, min, best guesses) • Stick with your plan.
What's in the Kit? • How many motors? • Assign them a task • Drive train • Wrist • Arm • Other components • Linear bearings • Pneumatics
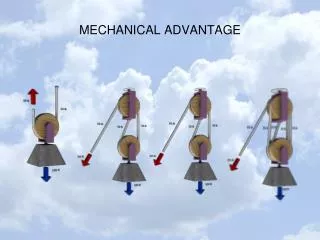
Torque • Torque = Force X Distance • The farther away something is, the harder it Is to lift. • Torque is less important than power. 10 lbs D
10 lbs D D Torque Example • Lifting – Same force applied • Different angle = less torque 10 lbs
Power • Power = Torque / Time Or • Power = Torque * Rotational Velocity • FIRST Def : How fast you can move something
Power Example • Same Torque – different speeds 10 lbs 10 lbs 0.1 HP, 100 RPM Motor w/ 1” sprocket 0.2 HP, 200 RPM Motor w/ 1” sprocket
Power • Summary • All motors can lift the same amount (assuming 100% power transfer efficiencies) - they just do it at different rates • BUT, no power transfer mechanisms are 100% efficient • Inefficiencies (friction losses, binding, etc.) • Design in a Safety Factor (2x, 4x)
Types of Manipulators • Articulating Arms • Telescopic Lifts • Latches • Ball Conveyors • Shooters • Winches • Combination Mechanisms
Articulating Arms • One or More Rotating Joints • Shoulder • Elbow • Wrist • This is the simplest form of Manipulator
Single Jointed Arms • One Shoulder Joint • Typically fixed end effectors • Easiest type to design and build. • Follows KISS methodology 330 in 2005
Multiple Jointed Arms • Added degrees of freedom • Added complexity • Every joint needs to be engineered • How will the operator control the device? 234 in 2001
Linkages • Linkages help control arms • Advantages of specified motion • 4-bar (most common), The end always stay parallel • Can be customized for the application
Linkage Examples 340 in 2007 217 in 2007
Vertical Lifts • Extension Lifts • Motion achieved by stacked members sliding on each other • Scissor Lift • Motion achieved by “unfolding” crossed members.
Extension Lift • Should be powered down AND up • If not, make sure to add a device to take up the slack if it jams • Segments need to move freely • Need to be able to adjust cable length(s). • Minimize slop / free-play • Maximize segment overlap • 20% minimum • more for bottom, less for top • Stiffness is as important as strength • Minimize weight, especially at the top • Movement within the robot dimensions • Extra weight due to required overlapping • Can be difficult to manufacture • Sections need to slide freely
Extension Lift Methods Cascade Continuous
Scissor Lift • Maximum height with minimal space • Unstable at the top of motion • Complex to design and build.
Scissor Lifts 1178 in 2008 158 in 2004
Arm Advice • Materials • Thin wall can help reduce weight • High bending strength (except for plastics) • Every Pivot has to be engineered • Each rotation point will have different forces • Linkages help control long arms. • Counter balance arms to reduce work on motors • Operator Interface (keep this in mind) • How will the drivers control the arm
Arm Advice • K.I.S.S. doesn’t mean bad • Feedback Control is HUGE • Potentiometers, encoders, limits • Automatically Take Action Based on Error • Design-in sensors from the start of design • Think outside the box. • Off the shelf components are good andymark.biz, DeWalt transmissions, etc )
Braking: Prevent Back-driving • Ratchet Device - completely lock in one direction in discrete increments - such as used in many winches • Clutch Bearing - completely lock in one direction • Brake pads - simple device that squeezes on a rotating device to stop motion - can lock in both directions • Disc brakes - like those on your car • Gear brakes - applied to lowest torque gear in gearbox • Note : any gearbox that cannot be back-driven alone is probably very inefficient
Grippers • FIRST Def: a device that takes hold of a game object • How to Grip • How to Hang on • Advanced controls
How to Grip • Pneumatic Linkage Grip • One axis • Two axis • Motorized grip • Roller Grip • Hoop Grip • Suction Grip 768 in 2008
Pneumatic Linkage Grip • Pneumatic cylinder extended and Retracts to open and close on the game object. • Multiple axis – The # of point of contact • Advantages • Quick grab and release • Easy to manufacture. • Disadvantages • Requires pneumatic system
Single Axis Example • Center acting cylinder • 2- points of contact • Some alignment issues Team 968 in 2004
2- axis example • Center acting cylinder • 3- points of contact Team 60 in 2004
Motorized Linear Grip • Gear driven linear grip • Mostly 1-axis grip • Advantages • Doesn’t require pneumatics • Tuned gripping force • Disadvantages • Tends to be slow • complex
Roller Grip • Uses rollers combined with a gripping action • Advantages • Good for fixing misalignment • Simple mechanism • Disadvantages • Problems releasing
Hoop Grip • Uses a flexible material to “cinch” the game object • Advantages • It will work • Disadvantages • Need precise Alignment • Not active release 5 in 2000
Vacuum Grip • Advantages • Many different styles of vacuum tips available • Simple • Disadvantages • Need a vacuum device • Easily knocked free. • Problematic
Hanging on • Friction – high coefficient needed • Over 1.0 mu • Rubber, Neoprene, silicone, Sandpaper • Force: Highest at grip point • Force = multiple x object weight (2-4) • Use linkages and mechanical advantage • Extra control - More axis of grip
Speed • Quickness covers mistakes • Quick to grab • Drop and re-Grab • Fast • Pneumatic Gripper • Not Fast • Motorized linear gripper, vacuum
Gripper Advice • Get the object fast • Hang on • Let go Quickly • Controls • The less the driver has to think about the better • Limit switches • Auto functions • Encoders
Latches • Small grippers typically for attaching to goals • Tips • Don’t depend on operator to latch use “smart mechanisms” • Must be able to let go quickly
Latch example: 267 • Pneumatic Latch • 2001 game • Grabs pipe • No “smart mechanism”
Latch example: 469 • Spring-loaded latch • Motorized release • Smart Mechanism • 2003
Latch example: 118 • Spring-loaded latch • Pneumatic release • Smart mechanism • 2002
Latching advice • Don’t depend on operator to latch, use a smart mechanism • Spring loaded (preferred) • Sensor met and automatic command given • Have a secure latch • Use an operated mechanism to let go • Be able to let go quickly • Pneumatic lever • Motorized winch, pulling a string
Ball Systems • Accumulator = rotational device that pulls objects in • Types: • Horizontal tubes - best for gathering balls from floor or platforms • Vertical tubes - best for sucking or pushing balls between vertical goal pipes • Wheels - best for big objects where alignment is pre-determined
Conveying & Gathering • Conveyor - device for moving multiple objects, typically within your robot • Types: • Continuous Belts • Best to use 2 running at same speed to avoid jamming • Individual Rollers • best for sticky balls that will usually jam on belts and each other
Conveyors Rollers • Use individual rollers • Adds weight and complexity Double Belts • Use pairs of belts • Increases size and complexity Single Belt - Use a slippery material for the non-moving surface
Ball System Tips • More control is better • Avoid Gravity feeds • Try to reduce “random” movements • Not all Balls are created equal • Balls tend to change shape • Building adaptive/ flexible systems • Speed vs. Volume • Optimize for the game and strategy
Ball Advice • Always have control of the balls • Gravity Feels will jam • The more capacity the better.
Design is an Iterative Process Final Design