Download
1 / 13
130 likes | 232 Views
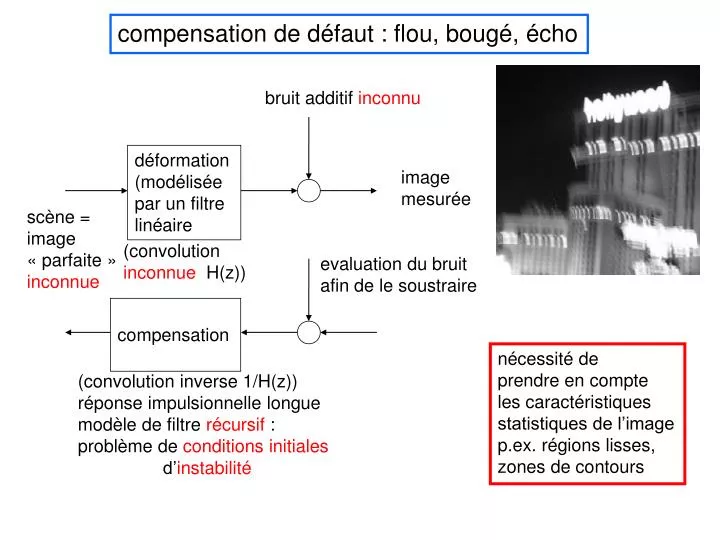
compensation de défaut : flou, bougé, écho. bruit additif inconnu. déformation (modélisée par un filtre linéaire. image mesurée. scène = image « parfaite » inconnue. (convolution inconnue H(z)). evaluation du bruit afin de le soustraire. compensation. nécessité de

E N D
compensation de défaut : flou, bougé, écho bruit additif inconnu déformation (modélisée par un filtre linéaire image mesurée scène = image « parfaite » inconnue (convolution inconnue H(z)) evaluation du bruit afin de le soustraire compensation nécessité de prendre en compte les caractéristiques statistiques de l’image p.ex. régions lisses, zones de contours (convolution inverse 1/H(z)) réponse impulsionnelle longue modèle de filtre récursif : problème de conditions initiales d’instabilité
compensation de défaut : flou, bougé, écho image mesurée caractéristiques du bruit filtre estimé scène estimée différence
High-quality Motion Deblurring from a Single Image Qi Shan, Jiaya Jia, and Aseem Agarwala http://www.cse.cuhk.edu.hk/~leojia/projects/motion_deblurring/index.html
convolution et addition de bruit dans le domaine des fréquences si on a une estimation de h(H) et de W comment estimer H et W ?
approche probabiliste fondée sur la règles de Bayes (probabilités conditionnelles et prise en compte de l’indépendance) probabilité de la réponse impulsionnelle du bougé probabilité du bruit sur l’image cas le plus simple bruit blanc gaussien probabilité de la scène photographiée approche efficace dans de nombreux types d’applications (p. ex. Markov)
http://www.cs.unc.edu/~lazebnik/research/fall08/lec05_deblurring.pdfhttp://www.cs.unc.edu/~lazebnik/research/fall08/lec05_deblurring.pdf
autres éléments plus ou moins pris en compte : il y a plus de hautes fréquences, les contours étant mieux marqués
estimer la réponse impulsionnelle du filtre modélisant le bougé on a une estimation de la scène f(x,y) minimisation de l’écart entre les deux images l’image mesurée l’image bougée prédite
estimer la réponse impulsionnelle du filtre modélisant la déformation « h(x,y) » coupe
reconstruction de la scène par filtrage inverse le filtre inverse n’est pas stable ; dépendance très forte des conditions aux limites exemple à une dimension défaut de bougé : filtre à réponse impulsionnelle finie reconstruction filtrage inverse récursif http://www.cse.cuhk.edu.hk/~leojia/projects/motion_deblurring/index.html
reconstruction de la scène par filtrage inverse le filtre inverse n’est pas stable ; dépendance très forte des conditions aux limites « forcer » les conditions aux limites afin de limiter les défauts dans les régions où le gradient est faible, il n’y a pas lieu de modifier l’image ; on fait l’hypothèse que le bruit présente des caractéristiques différentes dans les deux types de régions http://www.cse.cuhk.edu.hk/~leojia/projects/motion_deblurring/index.html
approche itérative nouvelle estimation de f(x,y) par filtrage inverse prenant en compte les caractéristiques statistiques du bruit, de la scène à reconstruire et de la réponse impulsionnelle du bougé (critère max de vraisemblance); nouvelle estimation du filtre h(x,y) minimisant l’écart entre l’image bougée et sa prédiction domaine où il faut trouver les bonnes conditions initiales pour effectuer le filtrage inverse taille du filtre modélidant le bougé
http://www.cse.cuhk.edu.hk/~leojia/projects/motion_deblurring/index.htmlhttp://www.cse.cuhk.edu.hk/~leojia/projects/motion_deblurring/index.html