Download
1 / 15
160 likes | 269 Views
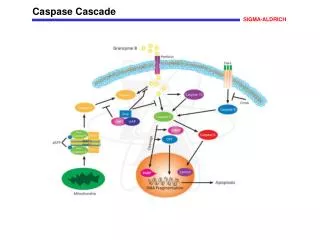
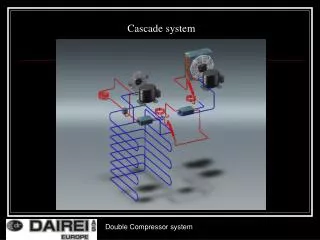
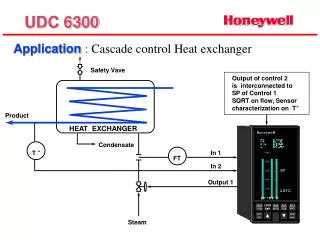
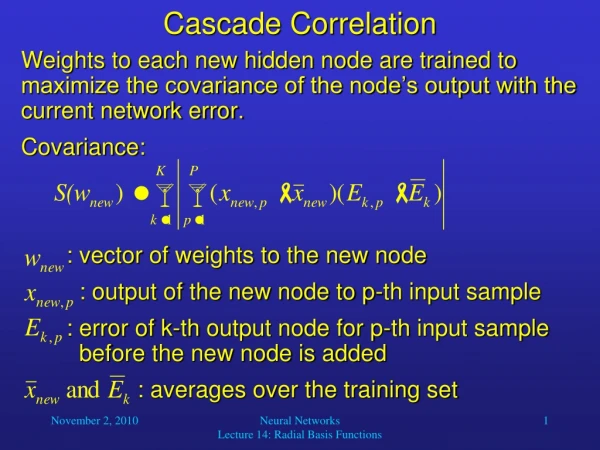
Cascade Control. CSE 425 Industrial Process Control Lecture 7. Introduction. Consider the following gas furnace. The goal is to control the outlet stream temperature . What are the disturbances ? What solution do you suggest?. Direct solution. Manipulate the fuel gas valve. V. F.

E N D
Cascade Control CSE 425 Industrial Process Control Lecture 7
Introduction • Consider the following gas furnace. • The goal is to control the outlet stream temperature. • What are the disturbances? • What solution do you suggest?
Direct solution • Manipulate the fuel gas valve. V F P
Problem • There is another source of disturbance: Fluctuations in the fuel pressureP can also change fuel flow rate F. This effect is quick. • Because the process is slow, the consequent change in outlet temperature T will occur only after some time. • Once the controller detects the change in T, it starts moving the temperature T back again to its set point Ts.
Cascade control solution • The fuel flow F is quickly affected by pressure variations P. • Furthermore F is easy to measure. • Idea: control the flow rate F. • By this way, we prevent pressure fluctuations P from propagating to temperature T. V F P
Block diagram of cascade control • Cascade control requires additional measurement (usually flow rate) and additional controller Gc2. • Cascade controllers are tunedstarting with the innermostloop.
Example Consider the following cascade system with a PI controller in the primary loop and a P controller in the slave loop. And the first-order transfer functions:
Consider only the inner loop. How does the inner loop improve the actuator (valve) performance and eliminate disturbance in the manipulated variable F (fuel-gas flow)? • Without the inner-loop, • With the inner-loop:
First: Comparing this to the case without cascade control we see that, for large K2: • the dc gain of Gv*→ 1. The primary controller becomes more effective on the fuel-gas flow. • the effective actuator time constant of Gv* becomes smaller (faster response).
Similarly, • With large gain K2, the dc gain from P to F → 0. • That is, the manipulated variable (flow F) becomes less sensitive to changes in the load compared to the case without cascade control:
(b) What is the value of K2 that makes the time constant of the inner-loop be one tenth of the original valve time constant? From the transfer function of the valve, its time constant is 1. From part (a), we already found the effective time constant of the inner loop Gv* to be
(c) For the value of K2 found in (b), find the steady state error in the inner loop. • The dc gain of the inner-loop is • Thus, the inner loop has a 10% steady state error (acceptable). This is expected because we have a P control K2 in the inner loop. • Remember that our objective is to control the temperature and not the flow. Therefore, as we do not want steady state error in T, we use PI controller in the outer (primary) loop.
(d) Tune the primary PI controller using ZN rules. • The equivalent process for the primary controller is given by:
The step response for this process is shown below. • Using ZN’s first method, the PI controller is given by
Class exercise • Why do we retain the primary controller? • Which modes are required for zero steady-state offset? • Which modes are recommended for primary and secondary controllers? • What is the additional cost for cascade control? • What procedure is used for tuning cascade control?