Download
1 / 10
100 likes | 252 Views
Deflection Calibration. Mechanical Engineering Seokchang Ryu Mi Hye Shin. Moment Diagram. : curvature at points. : position of sensors. : force point. ①. : Moment at ① and ②. ②. * Beam Theory *. ①. ②. Equations for Deflection. Derive deflection equations by integration. Notation :.

E N D
Deflection Calibration Mechanical Engineering Seokchang Ryu Mi Hye Shin
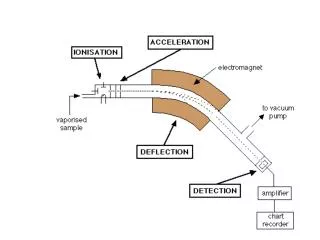
Moment Diagram : curvature at points : position of sensors : force point ① : Moment at ① and ② ② * Beam Theory * ① ②
Equations for Deflection Derive deflection equations by integration Notation : Boundary Conditions: ① ②
Plot for Needle Deflection Before : 0.7(mm) error Error at tip on x-axis: 0.09(mm) Error at tip on z-axis: 0.07(mm)
Assumptions 1. There are three sensors on two positions. Each sensor position is the same. Constant 2. Constant The distance between two positions is constant. If there is error at one position, then there will be almost same error at the other position.
Applying assumptions 1st Assumption 2nd Assumption
Result_1 Ifwe substitute in deflection equation, thenwe could obtain relation between deflection error and position error. (I consider the error in denominator has less effect than the error in numerator.)
Result_2 1. The error at tip and ∆y have linear relation. 2. Tip error has minimum value at ∆y=0.2~0.3(mm)