Download
1 / 23
250 likes | 721 Views
COE2011-06. Multi Rotor Flying Object. ภาควิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยขอนแก่น. โดย นายจักรกริช หล่อประโคน รหัส 513040478-0 นายจักรพรรณ ดีสุด รหัส 513040480-3. ความสําคัญ และที่มาของโครงการ วัตถุประสงค์ ของโครงการ ขอบเขต ของโครงการ

E N D
COE2011-06 Multi Rotor Flying Object ภาควิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยขอนแก่น โดย นายจักรกริช หล่อประโคน รหัส 513040478-0 นายจักรพรรณ ดีสุด รหัส 513040480-3
ความสําคัญและที่มาของโครงการความสําคัญและที่มาของโครงการ • วัตถุประสงค์ของโครงการ • ขอบเขตของโครงการ • แผนการดําเนินงาน • ผลที่คาดว่าจะได้รับ • การศึกษาข้อมูลเพิ่มเติม • การออกแบบและสร้างต้นแบบ • ปัญหาและข้อเสนอแนะ หัวข้อที่นำเสนอ
ความสําคัญและที่มาของโครงการความสําคัญและที่มาของโครงการ ปัจจุบันการพัฒนาเครื่องบินที่สามารถบินนิ่งในอากาศถูกพัฒนาขึ้นอย่างแพร่หลาย ซึ่งมีรูปแบบในการพัฒนาที่แตกต่างกัน ตามวัตถุประสงค์ของการใช้งาน เช่น เครื่องบิน UAV (Unmanned Aerial Vehicle) ทำหน้าที่เป็นเครื่องบินสำรวจ เป็นต้น
วัตถุประสงค์ของโครงการวัตถุประสงค์ของโครงการ 1. เพื่อออกแบบและสร้าง Multi Rotor Flying Object ที่มีความสมดุล โดยควบคุมผ่านระบบไมโครคอนโทรลเลอร์ 2. เพื่อประยุกต์ใช้งานเซนเซอร์ ได้แก่ ไจโรสโคป (Gyroscope) และ ตัววัดความเร่ง(Accelerometer) 3. เพื่อออกแบบและสร้างระบบควบคุมการบินของ Multi Rotor Flying Object 4. เพื่อศึกษาปัญหาและปัจจัยต่าง ๆ ที่มีผลต่อการบินในอากาศ
ขอบเขตของโครงการ เพื่อพัฒนาเครื่องบินที่สามารถบินลอยนิ่งในอากาศหรือสามารถควบคุมผ่าน รีโหมดบังคับได้ และศึกษาปัจจัยที่มีผลต่อการบิน
ผลที่คาดว่าจะได้รับ 1.ได้เรียนรู้การทำงานและการประยุกต์ใช้งานไจโรสโคป และ ตัววัดความเร่ง 2.ได้เรียนรู้การออกแบบระบบควบคุมโดยใช้ไมโครคอนโทรลเลอร์ 3.ได้ฝึกทักษะการแก้ปัญหา การทำงานเป็นกลุ่ม และการบริหารเวลา 4.ได้ฝึกการค้นคว้าและหาความรู้ด้วยตนเอง 5.เพื่อเป็นต้นแบบในการพัฒนาต่อยอดต่อไป
ศึกษาข้อมูลเพิ่มเติม • ข้อมูลเกี่ยวกับการสร้างเครื่องบินและเฮลิคอปเตอร์ ภาพ เครื่องบินในรูปแบบต่าง ๆ
หลักการควบคุมเครื่องบินหลักการควบคุมเครื่องบิน 1. การลอยตัวนิ่ง (Hovering)
2. การเร่ง-ลดความเร็วในแนวดิ่ง(Throttle)
3. การเอียงตัวซ้าย-ขวา (Roll)
4. การเอียงตัวหน้า-หลัง (pitch)
5. การหมุนตัวทวน-ตามเข็มนาฬิกา(yaw)
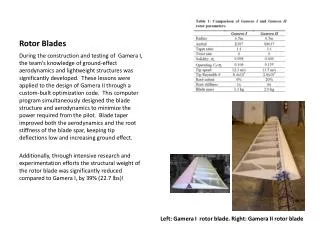
การออกแบบและสร้างต้นแบบการออกแบบและสร้างต้นแบบ หลักการออกแบบโครงสร้าง
วัสดุ-อุปกรณ์ Electronic Speed Controller : ESC Brushless DC Motor ใบพัด ATMEGA128 Board Gyroscope & Accelerometer Li-Po Battery วิทยุบังคับ 4 Channel
น้ำหนัก • มอเตอร์ 1400 KV จำนวน 4 ตัว • โดย KV คือ ค่าคงที่ของมอเตอร์ในหน่วยรอบต่อวินาทีต่อโวลต์ • ความเร็ว = = 16800 รอบ/วินาที • (มอเตอร์ 1400 KV ) x (แบตเตอรี่ 12 โวลต์) น้ำหนักเครื่องบินพร้อมบิน (Total play load) จากการคำนวณทางทฤษฎี รวมเท่ากับ 1350 กรัม แรงยกของมอเตอร์1 ตัว สามารถยกวัตถุที่มีน้ำหนักได้ในช่วง 500-700 กรัมโดยประมาณ ดังนั้น เครื่องบิน 4 ใบพัด สามารถยกน้ำหนักได้ทั้งหมด ประมาณ 2500 กรัม (2000-2800 กรัมโดยขึ้นอยู่กับแรงดันไฟฟ้า) ซึ่งเพียงพอต่อน้ำหนักเครื่องบินพร้อมบิน
แผนภาพระบบการทำงาน Motor Motor Motor Motor ESC ESC ESC ESC Microcontroller Accelerometer Communication Unit Gyroscope Power
11.1V Li-Po วงจรหลัก Vin GND แบตเตอรี่ Digital 3 Digital 9 Digital 10 Digital 11 Digital 6 Digital 5 Digital 4 Digital 2 AREF ESC • 11.1V+ A • B • PWM Out C NC มอเตอร์หน้า หมุนตามเข็มนาฬิกา ESC • 11.1V+ A • B • PWM Out C ROLL PITCH YAW THRO 5V GND NC พอร์ตเครื่องรับวิทยุ Atmega 128 I/O ESC • 11.1V+ A • B • PWM Out C NC 5V 3.3V GND มอเตอร์ขวา หมุนทวนเข็มนาฬิกา มอเตอร์ซ้าย หมุนทวนเข็มนาฬิกา 3.3V GND X-Accel Y-Accel Z-Accel X-Rate Y-Rate Z-Rate ESC • 11.1V+ A • B • PWM Out C Analog In 0 Analog In 1 Analog In 2 Analog In 3 Analog In 4 Analog In 5 NC พอร์ต ไจโรสโคปและ ตัววัดความเร่ง มอเตอร์หลัง หมุนตามเข็มนาฬิกา
ปัญหาและข้อเสนอแนะ • อุปกรณ์ • ขั้นตอน • การออกแบบ
สรุป Multi Rotor Flying Object เป็นเครื่องบินสี่ใบพัด ที่ถูกพัฒนาขึ้นโดยการประยุกต์ใช้ไมโครคอนโทรลเลอร์เพื่อควบคุมการทำงานของเครื่องบิน ให้สามารถลอยนิ่งในอากาศ หรือ บังคับทิศทางได้ทำให้ได้เรียนรู้หลักการของเครื่องบิน เพื่อออกแบบและสร้างเครื่องบิน ที่สามารถนำไปต่อยอดต่อไปได้
เอกสารอ้างอิง • “Quadcoptor” , International Conference on Smart Manufacturing Application April. 9-11, 2008 in KINTEX, Gyeonggi-do, Korea สืบค้นเมื่อ วันที่ 2 กรกฎาคม2554 • ภาพ ลักษณะการบินของ Quadcoptor , http://diydrones.com สืบค้นเมื่อ วันที่ 2 กรกฎาคม2554 • ภาพ มอเตอร์กระแสตรงแบบไร้แปรงถ่าน (Brushless DC motor) , http://www.bphobbies.com • สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพElectronic Speed Controller: ESC , http://www.silashop.net สืบค้นเมื่อ • วันที่18 กรกฎาคม 2554 • ภาพ ใบพัด GAUI ขนาด 8 นิ้ว http://www.heli-shop.com สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ แบตเตอรี่ Lithium-Polymer 11.1 โวลต์ 2200mAh , http://www.minircflying.com สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ ไมโครคอนโทรลเลอร์ AVR เบอร์ ATMEGA128 ,http://micro- research.co.th สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ 6DOF Razor ไจโคสโคป (Gyroscope) และ ตัววัดความเร่ง (Accelerometer) , • http://www.thaieasyelec.com/ สืบค้นเมื่อ วันที่18 กรกฎาคม 2554 • ภาพ วิทยุควบคุมและเครื่องรับสัญญาณ http://www.chartbin.com/ สืบค้นเมื่อ วันที่18 กรกฎาคม 2554
คำถาม ? ข้อเสนอแนะ