Download
1 / 12
120 likes | 144 Views
A New Method of Through Wall Moving Target Detection and Imaging using UWB-SP Radar. Shiyou Wu, Yanyun Xu, Jie Chen, Shengwei Meng, Guangyou Fang, Hejun Yin Institute of Electronics,Chinese Academy Sciences Beijing, China. Main Idea.

E N D
A New Method of Through Wall Moving Target Detection and Imaging usingUWB-SP Radar Shiyou Wu, Yanyun Xu, Jie Chen, Shengwei Meng, Guangyou Fang, Hejun Yin Institute of Electronics,Chinese Academy Sciences Beijing, China
Main Idea • A new algorithm is proposed to obtain the target shape imaging and track it synchronously using the time-delay difference curve in the application of through wall imaging. • The time-delay difference curve is a function of the positions of the receiving antennas of the special array. • A transform between the target position and the antenna position is applied to make the static antenna scan along a line related to the moving target.
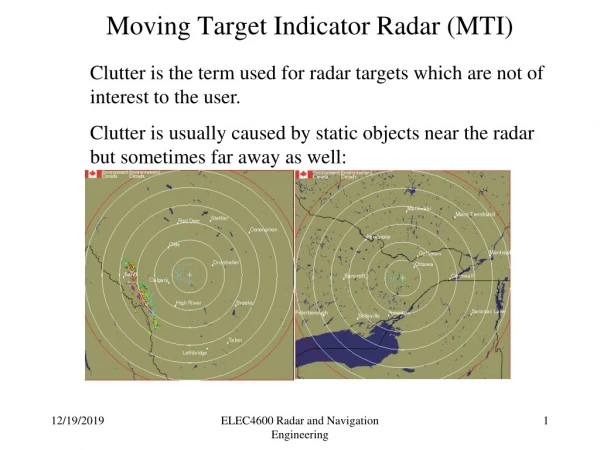
Background Ultra Wideband Short Pulse (UWB-SP) radar for detecting targets behind walls has become a promising technique to prevent crimes and terror due to its high range resolution, strong penetrating power and good resolving ability. In through wall radar imaging (TWRI), many studies have been done to develop efficient imaging algorithms based on UWB-SP radar.
Background SEABED (Shape Estimation Algorithm based on Boundary Scattering Transform and Extraction of Directly scattered waves) Takuya Sakamoto and Toru Sato,``A Target shape estimation algorithm for pulse radar systems based on boundary scattering transform,'‘ IEICE Trans. on Commun. Vol.E87-B, No.5, pp.1357-1365, May 2004. Point of Target boundary surface (x,y) Quasi Wavefront (X,Y)
Methods SEABED can not be applied to the TWRI directly as it does not take account of the influences of the wall. To offset the influences, the propagation path can be modified to apply to the relationship between the target boundary and the time delay in SEABED algorithm. The time delay KA-BC can be replaced by the virtual time delay (K’B-BC), where K’ denotes the virtual position of the antenna.
Methods Two different transmitting-receiving processes are taken into consideration. One is that the antenna located at the center of the circle C0 transmits the UWB pulse and receives the echo. The other is that signals are transmitted and received by the antennas located on the different positions of the circle C0. Assume that the propagation paths of the radio wave are mostly same except the path in the circle C0.
Methods The incident angle is indispensable when calculating the target boundary. The difference between the time-delays obtained from the first case and the second case is defined as a curve named the time-delay difference curve. This curve is the function of the positions of the antennas on the circle C0, and its peak value indicates the incident angle to the wall.
Methods As the antenna scanning is needed for static target imaging, an idea that moving motion is used to replace the scanning antenna is proposed, indicating that the echoes received by the fixed antenna when the target is moving are equivalent to the ones reflected from the static target and received by the scanning antenna along a measure line. This idea can help to solve the problem of the calculation of the incident angle for the transmitter using the antenna pair (T-R2-CR2).
Methods • Moving target shape estimation The true track and the boundary of the moving target can be estimated using the reflection points and their tangent and normal lines. These reflection points in the moving track are used to estimate the target’s boundary and moving parameters (horizontal and vertical velocity). The relation of target’s boundary and moving parameters is that the estimated boundary indicates whether the estimated moving parameters are correct and the right estimated moving parameters will lead to the correct target’s boundary directly.
Simulation A simulation, in which a single target behind a wall is moving along a line with a constant speed, is presented to show the effectiveness of the proposed method. The metallic ball radius is 0.25m. The target is moving along a line with constant moving parameters.
Results • The estimated boundary of the moving target behind a wall The corrected angles are processed to calculate the propagation paths and obtain 25 reflection points on the target’s boundary. These points represent the target’s boundary when the target locates at a specific position of its track. So take the first reflection point as the referring point, the estimated boundary can be calculated.
Summary • This approach comprises the system model design with a single transmitter, two receivers and two receiving arrays, and aims at realization of estimating the true moving track and imaging the target shape. • The most important part of this approach is the transform between target and antenna and it can help to solve the problem of the calculation of the incident angle for the transmitter. • Based on it, moving target tracking and moving target shape estimation can be finished.