Download
1 / 1
10 likes | 150 Views
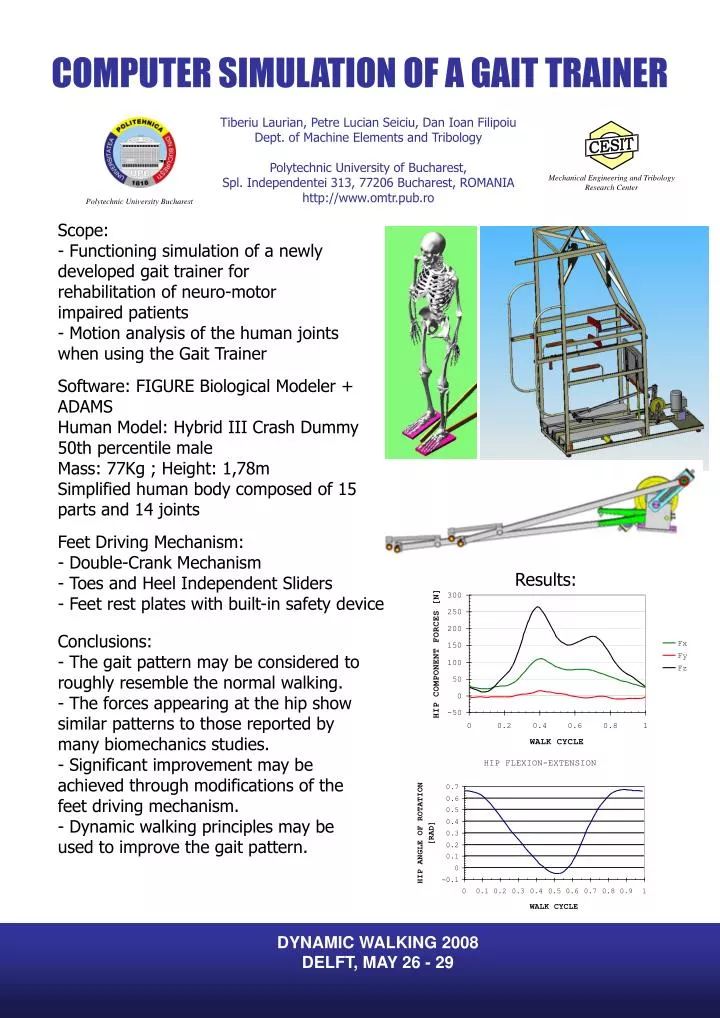
Mechanical Engineering and Tribology Research Center. Polytechnic University Bucharest. COMPUTER SIMULATION OF A GAIT TRAINER. Tiberiu Laurian, Petre Lucian Seiciu, Dan Ioan Filipoiu Dept. of Machine Elements and Tribology

E N D
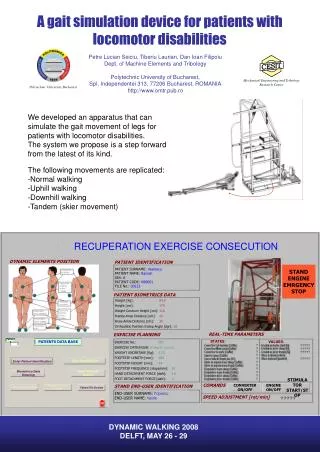
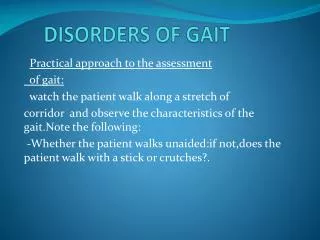
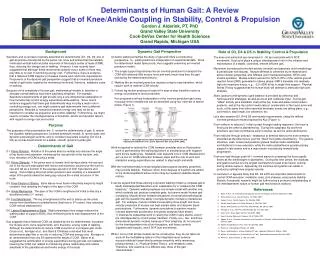
Mechanical Engineering and Tribology Research Center Polytechnic University Bucharest COMPUTER SIMULATION OF A GAIT TRAINER Tiberiu Laurian, Petre Lucian Seiciu, Dan Ioan Filipoiu Dept. of Machine Elements and Tribology Polytechnic University of Bucharest,Spl. Independentei 313, 77206 Bucharest, ROMANIA http://www.omtr.pub.ro Scope: - Functioning simulation of a newly developed gait trainer for rehabilitation of neuro-motor impaired patients - Motion analysis of the human joints when using the Gait Trainer Software: FIGURE Biological Modeler + ADAMS Human Model: Hybrid III Crash Dummy 50th percentile male Mass: 77Kg ; Height: 1,78m Simplified human body composed of 15 parts and 14 joints Feet Driving Mechanism: - Double-Crank Mechanism - Toes and Heel Independent Sliders - Feet rest plates with built-in safety device Results: Conclusions: - The gait pattern may be considered to roughly resemble the normal walking. - The forces appearing at the hip show similar patterns to those reported by many biomechanics studies. - Significant improvement may be achieved through modifications of the feet driving mechanism. - Dynamic walking principles may be used to improve the gait pattern. DYNAMIC WALKING 2008 DELFT, MAY 26 - 29