Download
1 / 20
200 likes | 243 Views
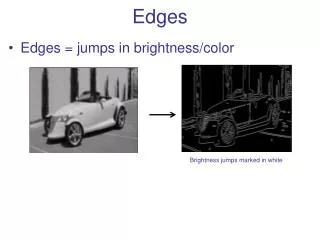
Learn about the properties and techniques of edge detection in images, including different types of edges, measuring change, edge detection algorithms like Canny edge detector, choosing edge pixels, color edges, contour following, and tracking issues.

E N D
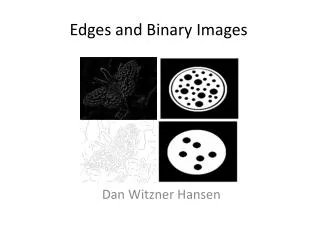
Edges • Humans easily understand “line drawings” as pictures.
What is an edge? • Edge = where intensity (or color or texture) changes quickly (large gradient) • Step edge • Roof edge • Noisy edge • In 2D, direction of max. gradient is perpendicular to the edge contour
Edge Properties • Magnitude • Edge strength (how sharp is the change?) • Direction • Orientation along edge • Perpendicular to gradient (greatest change in brightness) direction
Measuring Change • Difference (first derivative - S') • Look for large differences between nearby pixels 1D mask: -1 0 1 (vary # of 0’s) • Thick edges • Maximum absolute value at “center” of edge • Difference of differences (second derivative - S'') • Look for change from growing difference to shrinking difference 1D mask: 1 -2 1 • Value crosses zero at “center” of edge
Edge Detection (first derivative) • Roberts (“home” is upper-left, usually) 1 0 0 1 add the results of both 2x2 0 -1 -1 0 convolutions • Sobel (compute “vertical” and “horizontal” separately, take ratio v/h as estimate of tangent of angle of edge, v*v + h*h as estimate of magnitude of edge. 1 2 1 -1 0 1 0 0 0 -2 0 2 -1 -2 -1 -1 0 1 h v
Edge Detection (second derivative) • Laplacian – symmetric differences of differences 0 1 0 1 -4 1 4-connected 3x3 0 1 0 1 1 1 1 -8 1 8-connected 3x3 1 1 1 • Laplacian of Gaussian (LoG) (eq. 4.23) • Smooth first, then take second derivative • By properties of convolution, mix into one mask • Also called "Mexican Hat filter” • Difference of Gaussian (DoG) is often a good substitute (as in SIFT paper)
Finding the zero-crossing • Look directly for 0’s -- not a good idea (why?) • Look for values near zero -- still not too great? • Look for small regions that contain both positive and negative values - assign one value in the region as zero • Zero-crossing images look like “plate of spaghetti” http://library.wolfram.com/examples/edgedetection/Images/index_gr_87.gif
Properties of Derivative Masks • Sum of coordinates of the mask is 0 • Response to uniform region is 0 • Different from smoothing masks, with output = input for uniform region • Response of first-derivative mask is large absolute value at points of high contrast • Positive or negative depending on which side of the edge is dark • Response of second-derivative mask is zero-crossing at points of high contrast
Canny Edge Detector • Derived from “first principles” • Detect all edges and only edges (detection) • Put each edge in its proper place (localization) • One detection per edge (one response) • Mathematical optimization for first two, numerical optimization for all three • Assume edges are step edges corrupted by white noise
Canny Edge Detector (Algorithm) • Convolve image with Gaussian of scale s • Estimate local edge normal directions for each pixel • Find location of edges using one-dimensional Laplacian • (a form of non-maximal suppression) • Compute edge magnitudes • Threshold edges with hysteresis (as contours are followed) • (two thresholds - general and “border”) • Repeat for multiple scales & find persistent edges
Scale • Features exist at different scales • Gaussian smoothing parameter s chooses a scale • Edges can be associated with scale(s) where they appear
Choosing Edge Pixels • First (higher threshold) • Find strong edge pixels • Next (lower threshold) • Find (weaker, but not too weak) neighboring edge pixels to follow the contours • This ensures connected edges • Non-maximal suppression • Given directed edges, remove all but the maximum responding pixel in the perpendicular direction to the edge • This effectively thins the edges
Color Edges • Detect edges separately in each band (RGB, etc) – combine results for each point • Any edge detector can be used • Depending on combination method, issues can arise • Adding – what if edges cancel? • Or’ing – likelihood of thick edges. • Work in a higher dimension, e.g. 2x2x3 • Estimate local color statistics in each band and make decisions • Estimate magnitudes and orientations in each band, then compute weighted average orientation
Contour Following (General) • Assume a list of existing segments, a current segment, and a pixel • Examine every pixel • If "start", create a new segment with this pixel • If "interior", add it to the neighboring segment • If "end", add it to the neighboring segment and end that segment • If "corner", add to IN segment & end that segment, add pixel to OUT segment (or start one, if needed) • If "junction", add to IN segment and end that segment, also add to each OUT segment (creating new ones as necessary)
Contour Tracking Issues • Starting a new segment • Adding a pixel to a segment • Need current segment # • Ending a segment • Need current segment # • Finding a junction • Need "in" segment # and "out" segment #s • Finding a corner • Need "in" segment # and "out" segment #
Contour Tracking + Thresholding with Hysteresis • Original threshold (high) for selecting initial edge points • Second threshold (lower) for extending contours
Encoding Contours • Chain code • Each segment is coded by the direction to its successor (N, NE, E, SE, S, SW, W, NW) • Not amenable to further processing • Arc length parameterization (fig. 4.38) • Curve is “unwrapped”; x and y plotted separately
Matching Curves • First normalize: • Scale coordinates so total arc length = 1 • Translate coordinates so centroid is (0,0) • Then match: • Similar curves will have similar coordinates, except • Phase shift due to rotation • Shift in starting point
Fitting Lines to Contour • Given a contour (sequence of edgels) • Find a poly-line approximation (sequence of connected line segments) • For which all points lie sufficiently close to the contour. • Example:
Curve Approximation Algorithm • Begin with a single segment (the endpoints of the curve) • Repeatedly subdivide the worst-fitting segment until all segments fit sufficiently well • Find the point on the segment furthest from the contour • Split the segment, by creating a new point on the contour. Figure 4.43