Download
1 / 68
680 likes | 906 Views
Road-Based Routing in Vehicular Networks. PhD Dissertation Defense by Josiane Nzouonta Advisor: Cristian Borcea. Today: Smart Vehicles. Geographical Positioning System (GPS) Digital maps or navigation system On-Board Diagnostic (OBD) systems DVD player. Internet. Cellular. Cellular.

E N D
Road-Based Routing in Vehicular Networks PhD Dissertation Defense by Josiane Nzouonta Advisor: Cristian Borcea
Today: Smart Vehicles • Geographical Positioning System (GPS) • Digital maps or navigation system • On-Board Diagnostic (OBD) systems • DVD player
Internet Cellular Cellular Roadside infrastructure Roadside infrastructure Vehicle-to-vehicle Tomorrow: Vehicular Networks • Applications • Accident alerts/prevention • Dynamic route planning • Entertainment • Communications • Cellular network • Vehicle to roadside • Vehicle to vehicle
Vehicular Ad Hoc Networks (VANET) • My focus in this research • Benefits • Scalability • Low-cost • High bandwidth • Challenges • Security • High mobility
VANET Characteristics • High node mobility • Constrained nodes movements • Obstacles-heavy deployment fields, especially in cities • Large network size • Can applications based on multi-hop communications work in such environment?
Problem Statement • How to design efficient routing and forwarding protocols in VANET? • Do existing MANET routing protocols work well in VANET? • If not, can we take advantage of VANET characteristics to obtain better performance? • Are current forwarding protocols enough or can they be optimized for VANET characteristics?
Contributions • Road-Based using Vehicular Traffic (RBVT) routing • Use real-time vehicular traffic and road topology for routing decisions • Geographical forwarding on road segments • VANET distributed next-hop self-election • Eliminate overhead associated with periodic “hello” messages in geographical forwarding • Effect of queuing discipline on VANET applications • LIFO-Frontdrop reduces end-to-end delay compared with FIFO-Taildrop • RBVT path predictions • Analytical models to estimate expected duration of RBVT paths
Outline • Motivation • RBVT routing • Forwarding optimizations • Distributed next-hop election • Effect of queuing disciplines on VANET performance • RBVT path predictions • Conclusions
D N1 S a) At time t N1 S D N2 b) At time t+Δt Node Centric Routing Shortcomings in VANET • Examples of node-centric MANET routing protocols • AODV, DSR, OLSR • Frequent broken paths due to high mobility • Path break does not correspond to loss connectivity • Performance highly dependent on relative speeds of nodes on a path
S N1 N2 D Dead end road Geographical Routing Shortcoming in VANET • Examples of MANET geographical routing protocols • GPSR, GOAFR • Advantage over node-centric • Less overhead, high scalability • Subject to (virtual) dead-end problem
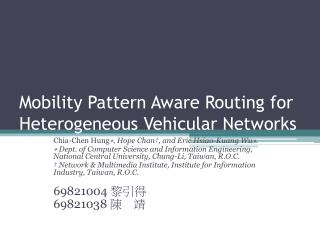
S Source I1 I3 I2 A B C I5 I4 Path in header: I8-I5-I4-I7-I6-I1 I6 I8 I7 E D car Destination Ij Intersection j RBVT Routing Main Ideas • Use road layouts to compute paths based on road intersections • Select only those road segments with network connectivity • Use geographical routing to forward data on road segments • Advantages • Greater path stability • Lesser sensitivity to vehicles movements
RBVT Protocols • RBVT-R: reactive path creation • Up-to-date routing paths between communicating pairs • Path creation cost amortized for large data transfers • Suitable for relatively few concurrent transfers • RBVT-P: proactive path creation • Distribute topology information to all nodes • No upfront cost for given communication pair • Suitable for multiple concurrent transfers
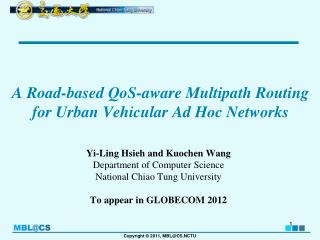
RBVT-R Route Discovery • Source broadcasts route discovery (RD) packet • RD packet is rebroadcast using improved flooding • Intersections traversed are stored in RD header S Source I1 I3 I2 N1 A Re-broadcast from N1 B Re-broadcast from B C I5 I4 I6 I8 I7 E D car Destination Ij Intersection j
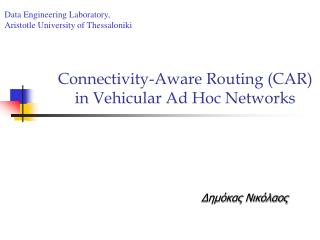
RBVT-R Route Reply • Destination unicasts route reply (RR) packet back to the source • Route stored in RR header • RR follows route stored in the RD packet S Source I1 I3 I2 A B C I5 I4 Path in reply packet header I1 I6 I7 I6 I8 I7 E D I4 I5 I8 car Destination Ij Intersection j
RBVT-R Forwarding • Data packet follows path in header • Geographical forwarding is used between intersections Path in data header S Source I1 I1 I3 I2 I6 I7 A I4 I5 B I8 C I5 I4 I6 I8 I7 E D car Destination Ij Intersection j
RBVT-R Route Maintenance • Dynamically update routing path • Add/remove road intersections to follow end points • When path breaks • Route error packet sent to source • Source pauses transmissions • New RD generated after a couple of retries S Source I1 I3 I2 N1 A Re-broadcast from N1 B Re-broadcast from B C I5 I4 I6 I8 I7 E D car Destination Ij Intersection j
Unicast connectivity packets (CP) to record connectivity graph Node independent topology leads to reduced overhead Lesser flooding than in MANET proactive protocols Network traversal using modified depth first search Intersections gradually added to traversal stack Status of intersections stored in CP Reachable/unreachable RBVT-P Topology Discovery CP generator n n-1 I1 I3 I2 A 2 1 B 7 8 C I5 I4 3 6 9 5 4 I6 I8 I7 E car i Step i Ij Intersection j
CP content is disseminated in network at end of traversal Each node Updates local connectivity view Computes shortest path to other road segments Iv1 I1 I2 I3 Iv2 Iv4 Iv3 I1: I2, I6, Iv1 I4 I5 I6: I1, I7 I7: I6, I4 I4: I7, I5, Iv3 I5: I4, I8, Iv4 I2: I1, Iv2 RU content I6 I8 I7 Ij Reachability Intersection j RBVT-P Route Dissemination & Computation
RBVT-P Forwarding and Maintenance • RBVT-P performs loose source routing • Path stored in every data packet header • Intermediate node may update path in data packet header with newer information • In case of broken path, revert to greedy geographical routing
RBVT Evaluation • Perform simulations to compare against existing protocols • Comparison protocols: • AODV (MANET reactive) • GPSR (MANET geographical) • OLSR (MANET proactive) • GSR (VANET) • Metrics • Average delivery ratio • Average end-to-end delay • Routing overhead
Simulation Setup • Network Simulator NS-2 • Map: 1500m x 1500m from Los Angeles, CA • Digital map from US Tiger/Line database • SUMO mobility generator • Obstacles modeled using random selection of signal attenuation • Range [0dB, 16dB] • Shadowing propagation model
Simulation Setup (cont’d) Data rate 11Mbps
Average Delivery Ratio • RBVT-R has the best delivery ratio performance • RBVT-P improves in medium/dense networks • The denser the network, the better the performance for road-based protocols in these simulations
Average End-to-end Delay • RBVT-P performs best, consistently below 1sec in the simulations • RBVT-R delay decreases as the density increases (less broken paths)
Outline • Motivation • RBVT routing • Forwarding optimizations • Distributed next-hop election • Effect of queuing disciplines on VANET performance • RBVT path predictions • Conclusions
The Problem with “hello” Packets • “hello” packets used to advertise node positions in geographical forwarding • “hello” packets need to be generated frequently in VANET • High mobility leads to stalled neighbor node positions • Presence of obstacles leads to incorrect neighbor presence assumptions • Problems in high density VANET • Increased overhead • Decreased delivery ratio
(0.201ms) n1 n5 D r RTS (0.0995ms) ns n2 (NULL) (0.115ms) n4 n6 n3 (a) RTS Broadcast and Waiting Time Computation n1 r n5 D ns CTS n2 n4 n6 n3 (b) CTS Broadcast n1 n5 D r Data ns n2 n4 n6 n3 (c) Data Frame n1 r n5 D ACK ns n2 n4 n6 n3 Distributed Next-hop Self-election • Slight modification of IEEE 802.11 RTS/CTS • Backward compatible • RTS specifies sender and final target positions • Waiting time is computed by each receiving node using prioritization function • Next-hop with shortest waiting time sends CTS first • Transmission resumes as in standard IEEE 802.11
Waiting function • Function takes 3 parameters • Distance sender to next-hop (dSNi) • Distance next-hop to destination (di) • Received power level at next-hop (pi) • Weight parameters α set a-priori • Value of α determines weight of corresponding parameter
Waiting Function Results • Using multi-criteria function to select next hops leads to significantly lower packet loss and overhead in VANET
Evaluation of Self-election Performance • Goal: Verify and quantify if/how self-election improves performance in high congestion scenarios • Metrics • Average delivery ratio • Average end-to-end delay • Routing overhead • Used own mobility generator based on Gipps car-following and lane-changing models • Simulations parameters same as used for RBVT evaluation • Map used in the no obstacle simulations
Delivery Ratio & Delay • RBVT-R with source selection using “hello” packets vs. self-election • Distributed next-hop self election • Increases delivery ratio • Decreases end-to-end delay
Outline • Motivation • RBVT routing • Forwarding optimizations • Distributed next-hop election • Effect of queuing disciplines on VANET performance • RBVT path predictions • Conclusions
Effect of Current Queue Discipline on Delay • Current queuing discipline: FIFO with Taildrop (TD) • Wireless contention increase time packets spend in queue • Low percentage problem frames have significant impact on average delay
Improving Delay through Queuing Discipline • Why improve? • Delay sensitive but loss tolerant applications important in VANET/MANET • Applications: video streaming near an accident; search and rescue operations • Analyze four queuing disciplines • FIFO-Taildrop (FIFO-TD) • FIFO-Frontdrop (FIFO-FD) • LIFO-Taildrop (LIFO-TD) • LIFO-Frontdrop (LIFO-FD)
Single Queue Analysis • Probabilities of service and failure • Probabilities of service/failure given that packet arrives with system in state k • And for all disciplines
Single Queue Analytical Results • Low traffic rate ρ = 0.75 • Expected waiting times are similar for all 4 disciplines • Variance of waiting times higher for LIFO disciplines
Single Queue Analytical Results (cont’d) • High traffic rate ρ = 1.5 • LIFO-FD presents low expected waiting times of packets served • Variance of waiting times of served packets is also lowest for LIFO-FD and highest for LIFO-TD
Network Evaluation • Evaluation • Assess performance in ad hoc networks, static and mobile • Metrics: average end-to-end delay, end-to-end jitter, throughput Static topology
Average End-to-end Delay • Static ad hoc network scenario • Comparable performance for low traffic • LIFO disciplines have best and worst performance in high traffic
Average Jitter • Static ad hoc network scenario • Low traffic: less than 40ms jitter for all 4 • FIFO has lowest jitter • High traffic: LIFO-FD maintains less than 1sec jitter with buffer size increase
Delay & Throughput in VANET • No obstacles map with 250 nodes, RBVT-R • LIFO-FD leads to lower delay (as much as 45%) • Throughput not aversely affected by LIFO-FD
Outline • Motivation • RBVT routing • Forwarding optimizations • Distributed next-hop election • Effect of queuing disciplines on VANET performance • RBVT path predictions • Conclusions
Characterization of RBVT Paths • Why? • How long is the current route going to last? • Does it make sense to start a route discovery? • Can a 100Mb file be successfully transferred using the current route? • Is it possible to estimate the duration of a path disconnection? • How to estimate path characteristics (connectivity duration/probability)? • Simulations are specific to geographical area • Analytical models based on validated traffic models are preferred
Lc = 7.5m car 3, v3=1 car 2, v2=2 car 1, v1=2 gap1 = 4 cells gap2 = 1 cell gap3≥ 3 cells (a) At time t car 3, v3=1 car 1, v1=2 car 2, v2=1 gap1 = 3 cells gap2 = 1 cell gap3≥ 2 cells (b) At time t+1 Cellular Automata (CA) Traffic Model • Update rules at vehicle i • Acceleration: if vi < vmax, vi = vi + 1 • Slow down (if needed): if vi > gapi, vi= gapi • Randomization: vi = vi – 1 with probability p • Move car: xi = xi + vi
DTMC-CA Model • Discrete-time and discrete space model • Uses CA microscopic traffic model for vehicle movements • Portion of road between source and destination divided in k cells of length Lc • Markov chain M = (S, P, s0) • State space S = {s = (c1, c2, …, ck), ciє V, i=(1,…, k)} • Cell values V = {0, 1, 2, …, vmax, ∞} • Interested only in stationary measures
1 0 2 0 Time t-1 Time t-1 0 2 0 3 Time t Time t State Reduction: Invalid States • As described, |S| = |V|k • Many potential states are transient states • Violate updating rules • Not reachable from any other state in the system • Algorithm to output non-transient states • Directly obtaining non-transient states needed
State Reduction: Lumpability • Markov chain is lumpable w.r.t with • Example • Additional 80% decrease in size of space set observed when lumping the Markov chain
2 1 1 0 Road section Cell number 2 3 4 5 6 7 8 9 10 1 For cell 2: 2 = 3 2 = 0 For cell 3: 3 = 5 3 = 0 Borders: 0 = 3 10 = 9 For cell 6: 6 = 7 6 = 5 Transition Matrix • Generic transition probability from state of aggregated Markov chain
Probabilistic Measures • Stationary distribution π • Connected states S1 • Disconnected states S2 S1US2 =S S1∩S2 =Ø • Expected duration of connectivity
Probabilistic Measures (cont’d) • Expected duration of disconnection • Probability of connection duration