Download
1 / 33
340 likes | 356 Views
Discover the concept of atmospheric pressure and its measurement using various instruments like barometers. Gain insights on the laws of thermodynamics governing pressure changes. Explore the importance of accurate pressure measurement for meteorological observations.

E N D
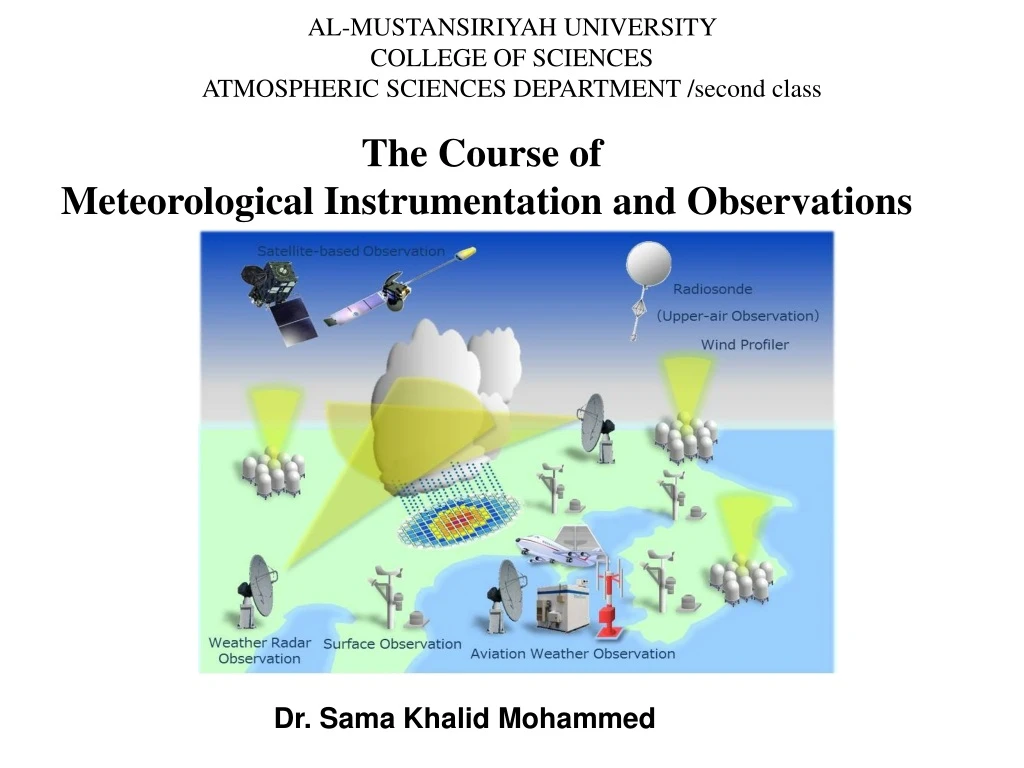
AL-MUSTANSIRIYAH UNIVERSITY COLLEGE OF SCIENCESATMOSPHERIC SCIENCES DEPARTMENT /second class The Course of Meteorological Instrumentation and Observations Dr. Sama Khalid Mohammed
Welcome Students! LECTURE SEVEN
Pressure Pressure: Force F exerted by the air molecules over a given area A. where 100Pa = 1mb • Atmospheric pressure is created by the weight of the atmosphere per unit area above the observation point, it can vary depending on ambient temperature, altitude and local weather conditions. • It is a fundamental atmospheric quantity in providing synoptic information and because of its close relationship with height and atmospheric thickness. • Accurate measurement by radiosondes, serve to define the dynamical state of the atmosphere. There are two ways to look at pressure: (1) the small scale action of individual air molecules or (2) the large scale action of a large number of molecules.
On the small scale, from the kinetic theory of gases, a gas is composed of a large number of molecules that are very small relative to the distance between molecules. • The molecules of a gas are in constant, random motion and frequently collide with each other and with the walls of any container. • During collisions with the walls, there is a change in velocity and therefore a change in momentum of the molecules. • The change in momentum produces a force on the walls which is related to the gas pressure. • The pressure of a gas is a measure of the average linear momentum of the moving molecules of a gas. • On the large scale, the pressure of a gas is a state variable, like the temperature and the density. • The change in pressure during any process is governed by the laws of thermodynamics.
If a gas is static and not flowing, the measured pressure is the same in all directions which is the static pressure. But if the gas is moving, the measured pressure depends on the direction of motion. This leads to the definition of the dynamic pressure. • The atmospheric pressure must be measured as absolute pressure, Its value at mean sea level is approximately
Surface pressure measurements are conventionally corrected for the variation in pressure with height, which shows a reduction of about 1 hPa per 10 m of altitude near the surface. • The pressure as observed without correction for altitude is known as the station pressure, whereas the mean sea level pressureis that corrected to the universally agreed sea level datum. • A measuring instrument for atmospheric pressure is known as a barometer, and one able to produce a chart record is known as a barograph. • The desirable accuracy in pressure measurement at the surface or aloft is about ±0.1 hPa, equivalent to 1 part in 104, which is a very demanding requirement for a routine scientific measurement.
Barometers • Instruments to measure atmospheric pressure have been used for over three centuries, and have been traditionally divided into two broad categories, depending on whether they use a liquid (usually mercury) as the sensing element, or not (aneroid barometers). • Mercury barometers measure pressure by determining the height of a liquid column, which is related to pressure by the hydrostatic equation. • Aneroid barometers use a thin metal chamber or diaphragm, having a membrane which deforms under pressure differences which can be measured mechanically or electronically.
Liquid barometers Pressure differences can be measured by the change in position of a liquid in a tube. If the tube is made symmetric, such as in a ‘U’ shaped tube, the difference in height of the fluid between one side and the other depends directly on the pressure difference applied and the density of the liquid concerned. The difference in height Δh is related to the pressure difference ΔP by the hydrostatic equationΔP = Δh𝜌g , where 𝜌 is the liquid’s density and g acceleration due to gravity. The pressure difference and height difference are related by P2 − P1 = h1𝜌g , but, if the tube is sealed and evacuated, to establish a vacuum, the atmospheric pressure and height vary directly together as Pa = h2𝜌g , This configuration is adapted to provide the operating principle of the liquid barometer.
A mercury-in-glassbarometer is a standard instrument for measuring static pressure. In this instrument, two columns connected at the base are used, one evacuated and sealed at the top of the column and so subject to no pressure, and the other exposed to the atmosphere at the top. The difference in height between the two columns depends on the atmospheric pressure and the known density of mercury and is therefore used to infer the pressure. Mercury has a low vapor pressure at the temperatures required, and is easily cleaned. It does not wet the glass walls of tubes, which leads to formation of a convex meniscus, providing a well-defined measurement datum. A disadvantage is that mercury does show appreciable thermal expansion, also mercury barometers are not very portable so are unsuitable for remote automatic data logging. Usually used as free standing devices for station barometers.Mercury is a cumulative poison, absorbed through the skin.
AneroidBarometer Aneroid barometers are more convenient to use than mercury barometers and avoid the hazard associated with use of mercury. An aneroid barometer uses a small, flexible metal box called an aneroid cell (sensor). This aneroid capsule (cell) is made from an alloy of beryllium and copper. The evacuated capsule (or usually more capsules) is prevented from collapsing by a strong spring. Small changes in external air pressure cause the cell to expand or contract. This change in dimension can be monitored mechanically or electrically. This expansion and contraction drives mechanical levers such that the tiny movements of the capsule are amplified and displayed on the face of the aneroid barometer. The properties of the mechanism limits accuracy of the dial reading, as it may stick or exhibit hysteresis.
Barographs • In a barograph, multiple aneroid capsules are connected together “to increase the sensitivity to pressure changes” to move a needle on a smoked foil or to move a pen upon paper, both of which are attached to a drum moved by clockwork. • The barograph is usually set up to measure the mean sea level pressure without correction, as, although not very accurate (±1 hPa), its importance is in providing a continuous record of pressure tendency.
Flexible diaphragm sensors • These are based on a similar principle to that of an aneroid capsule, but rely either on detecting the flexing of a thin silicon diaphragm with changes in pressure, or changes in capacitance associated with changes in the separation between the diaphragm and a fixed plate. The latter type of sensor can be very small and light, and is used in radiosondes for measuring the pressure at the altitude reached by the instrument package. • An alternative approach is to couple the diaphragm to a resistive strain gauge, for a direct electrical output related to pressure. Such sensors are suitable for remote and automatic pressure measurements, but suffer from substantial temperature errors. Compensation systems, temperature characterisation or temperature stabilisation are therefore required.
Vibrating cylinder barometer • A vibrating cylinder barometer is capable of very high accuracy and stability. • The operating principle is based on detecting the natural frequency of oscillation in the ‘hoop’ vibrating mode of a thin-walled cylinder (open to the atmosphere), which is surrounded by a near vacuum. • The oscillations are excited by magnetic forces from electromagnetic coils placed around the cylinder and detected by the induced current in detector coils. A feedback signal processing system is used to ‘tune’ the forcing to the natural frequency of the cylinder to sustain the oscillations.
The natural frequency obtained is measured using a frequency counter. • The natural frequency of the cylinder depends on both the pressure and density of the air inside the cylinder, but shows a complicated non-linear response which has to be obtained empirically by calibration. • (The influence of density is also allowed for by measuring the temperature of the sensor.) Precision versions of this instrument are able to measure atmospheric pressure to an accuracy of better than ±0.05 hPa, and with a resolution of 0.01 hPa.
Wind Speed and Direction Although airflow in the atmosphere is a three-dimensional velocity field, it is the horizontal component of its motion which is commonly measured, because the vertical component is generally much smaller. Measuring the horizontal air velocity determines the wind vector V = (u, v), where u is the west to-east (zonal) component, and v the south-to-north (meridional) component. Often only the magnitude of the vector (i.e. the wind speed, which is usually given the symbol U) is measured, with the wind direction measured entirely independently. An instrument for measuring the wind speed is known as anemometer; the mechanical device turned by the wind to indicate the direction from which the wind is blowing is a wind vane. Properties used to determine wind speed include the flow’s kinetic energy (dynamic) (cup and propeller anemometers), cooling (hot wire or film anemometer) and the effective speed of sound in a moving reference frame (sonic anemometer).
Cartesian Coordinates Using Cartesian Coordinates we mark a point by how far along and how far up it is: Polar Coordinates Using Polar Coordinates we mark a point by how far away, and what angle it is:
Wind Measurements Wind measurements are usually taken in the polar coordinate, in which winds are written as two components: wind speed and direction. Local right-hand Cartesian coordinate W Up North y V x U East O O Polar coordinate
Conversion to speed and direction Wind sensors Wind sensors have three classes of instruments: 1. dynamic force anemometers 2. pressure pulse frequency anemometers 3. thermal anemometers Conversion to U and V Unites of wind speeds m/s, mile/h, km/h, knot, …
Dynamic force anemometers: they consist of cup anemometers, vane windmill, and gill-type anemometers . • The rotation rate is proportional to wind speed, which sometimes drives an electrical generator that gives voltage output which is proportional to the wind speed. • The inertia of the sensor determines the threshold. Thus, the smaller and lighter of the sensor, the more sensitive it is. Cup anemometer Vane windmill Gill-type anemometer
Cup anemometer A typical cup anemometer has three conical or hemispherical collecting cups mounted at equal distances from a vertical shaft by equally spaced horizontal supporting arms. The vertical shaft rotates on bearings arranged to cause as little mechanical loading as possible. The asymmetry of the cup arrangement ensures that the anemometer always rotates the same way irrespective of the direction of the incoming wind. The response characteristic of a cup anemometer is close to linear, and can be described by 𝜔 = k (U − U0) , where 𝜔 is the angular rotation speed, U is the wind speed, U0 is the starting speed for the anemometer and k a calibration constant. Typically, U0 is about 2 m s−1 for large-cup anemometers used in a climatological station, but may be only 0.5 m s−1 for a light anemometer with good bearings as used in micrometeorology.
The output signal from a cup anemometer may be a voltage proportional to rotation speed (e.g. from a DC generator) or a series of electrical pulses generated by an optical or magnetic switch on the rotating shaft. Anemometer factor :isthe actual relationship between the speed of the wind and the speed of the cups. It depends on the dimensions of the cups and arms, and the relationship may vary for different anemometers. • To determine wind direction for cup anemometer is to add a separate of wind vane for directional readings.
Propeller anemometer In contrast to a cup anemometer, a propeller anemometer provides a directional response, and, if the sensing propeller is made of lightweight material, it can be accelerated and decelerated rapidly by the wind. Examples of propeller anemometers are Gill Propeller Anemometer. These use a ‘helicoidal’ design of lightweight propeller, mounted on a shaft to drive a small DC generator. If the anemometer shaft is inclined at a small angle 𝜃 to a steady air flow of speed U, the rotation rate of the shaft is expected to be given by 𝜔 = k (U − U0) cos 𝜃 The starting speed is much lower than for most cup anemometers (typically 0.2 m s−1 ). This type of anemometer is suitable for measuring turbulent fluctuations of air speed along one direction. Unfortunately, Equation above is only approximated for relatively small angles (typically less than 30o), due to the effect of one blade interrupting the flow to another blade, known as blade sheltering.
Pressure pulse frequency anemometers(sonic anemometer ) It measures the variation of speed of sound with wind The device sends a synchronized sound pulse and measures the difference in time of sound. u is the velocity of the wind, is the distance, and c is the speed of sound. The best way to get the wind direction is to measure the components in all three directions
2-D sonic anemometer 3-D sonic anemometer • The spatial resolution is given by the path length between transducers, which is typically 10 to 20 cm • Sonic anemometers can take measurements with very fine temporal resolution, 20 Hz or better, which make them well suited for turbulence measurements.
The lack of moving parts makes them appropriate for long term use in exposed automated weather stations and weather buoys where the accuracy and reliability of traditional cup-and-vane anemometers is adversely affected by salty air or large amounts of dust. • Their main disadvantage is the distortion of the flow itself by the structure supporting the transducers, which requires a correction based upon wind tunnel measurements to minimize the effect. • 2-D (wind speed and wind direction) sonic anemometers are widely used in applications such as weather stations, ship navigation, wind turbines, aviation and weather buoys. • Most sonic anemometer can also measure temperature.
Thermal anemometers (hot wire anemometers ) • It uses a very fine wire (on the order of several micrometers) electrically heated up to some temperature above the ambient. • Air flowing past the wire has a cooling effect on the wire. As the electrical resistance of most metals is dependent upon the temperature of the metal (tungsten is a popular choice for hot-wires), a relationship can be obtained between the resistance of the wire and the flow velocity. Hot-wire devices can be classified as 1. CCA (Constant-Current Anemometer) 2. CVA (Constant-Voltage Anemometer) 3. CTA (Constant-Temperature Anemometer) • The voltage output from these anemometers is thus the result of some sort of circuit within the device trying to maintain the specific variable constant (current, voltage or temperature) • For example, in CTA mode, the current I through the sensor is related to the wind speed by King’s law
Hot-wire anemometers, while extremely delicate, have extremely high frequency-response and fine spatial resolution compared to other measurement methods, and as such are almost universally employed for the detailed study of turbulent flows, or any flow in which rapid velocity fluctuations are of interest.
Laser Doppler anemometers • Laser Doppler anemometers use a beam of light from a laser. • Particulates flowing along with air molecules near where the beam exits reflect, or backscatter, the light back into a detector, where it is measured relative to the original laser beam. • When the particles are in great motion, they produce a Doppler shift for measuring wind speed in the laser light, which is used to calculate the speed of the particles, and therefore the air around the anemometer.
Wind profilers • A wind profiler is a type of sensitive Doppler radar that uses electromagnetic waves or sound waves (SODAR) to detect the wind speed and direction at various elevations above the ground, up to the troposphere (i.e., between 8 and 17 km above mean sea level). • A wind profiler is designed to point (nearly) vertically and to respond to fluctuations of the refractive index of the (clear) air. • The fluctuations of the refractive index are due to turbulence. • They are so sensitive that they can translate the backscattered energy from these eddies into a vertical picture of wind speed and direction in a column of air. • Wind Profilers detect minute fluctuations in atmospheric density, caused by the turbulent mixing of volumes of air with slightly different temperature and moisture content.
The horizontal wind is measured by oblique beams in orthogonal directions (e.g. east and north). The beams are tilted 15 to 30 degrees from the zenith, and the Doppler shift of the echoes in each direction is compared to determine the wind speed and direction. This can be summarized as follows. A wind profiler operates on a simple 3 beam system: one pointing to the vertical, and two beams are tilted from the zenith, say 15 degree as illustrated by the figure below. vz, vrx, and vry can be obtained from the vertical and tilted beams by determining the Doppler shift.
Typical frequencies used in wind profiling • 45-65 MHz • 404-482 MHz • 915-924 MHz • 1280-1357.5 MHz The 915 MHz (33 cm, UHF) profiler measures the wind at low levels, typically up to 1-3 km above ground level, depending on atmospheric conditions, especially humidity. The top of the atmospheric boundary layer marked by the entrainment zone is very visible because the large humidity and temperature gradient there cause a large change in index of refraction. The 915 MHz profiler has fairly small antennas (at most 2x2 or 3x3 m), making it transportable and less expensive.
RASS (Radio Acoustic Sounding System) A profiler site equipped with the RASS option has the capability to measure and produce vertical temperature profiles. The speed of sound is affected by the temperature of the atmosphere. Sound travels through the atmosphere at slightly different speeds at different temperatures. RASS uses this principal to track the speed of the acoustic energy emitted from the RASS Transducers as the sound waves propagate up through the atmosphere. The temperatures of the atmosphere at specific heights are extrapolated from the speed of the RASS wave propagation.