Download
1 / 26
260 likes | 438 Views
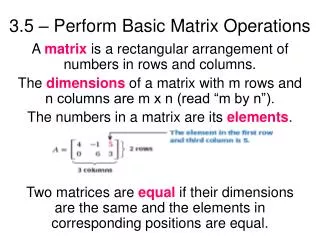
3.IV. Matrix Operations. In Section 3.III, matrix was defined in terms of linear maps. Operations on matrices will be defined to represent operations on linear maps. Matrix algebra is a linear algebra ( M , + , · ; R ). 3.IV.1. Sums and Scalar Products

E N D
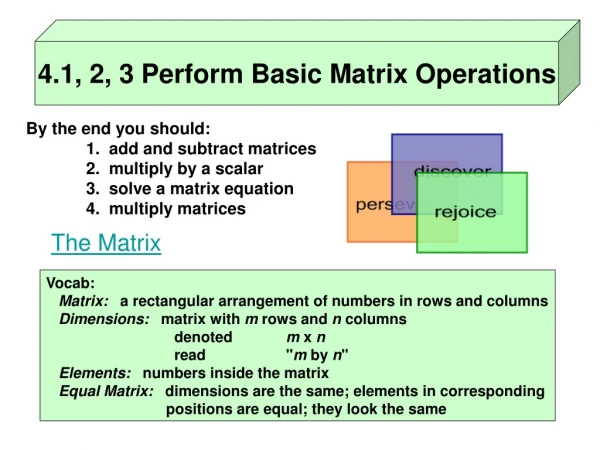
3.IV. Matrix Operations • In Section 3.III, matrix was defined in terms of linear maps. • Operations on matrices will be defined to represent operations on linear maps. • Matrix algebra is a linear algebra ( M, + , · ; R ). 3.IV.1. Sums and Scalar Products 3.IV.2. Matrix Multiplication 3.IV.3. Mechanics of Matrix Multiplication 3.IV.4. Inverses
3.IV.1. Sums and Scalar Products Definition: Sum of Maps of the Same Domain & Codomain The sum of maps f, g : V → W is another map h = f + g : V → W by v f(v) + g(v) Definition 1.3: Matrix Addition & Scalar Multiplication Let A = ( ai j ) & B = ( bi j ) be mn matrices. Then C = A + B is an mn matrix with elements ci j ai j + bi j . And C = α A , with α R,is an mn matrix with elements ci j α ai j . Theorem 1.5: Matrix Representations Let f, g : V → W be maps with bases B → D so that F = f B → D & G = g B → D . Then ( f + g )B → D = F + G & (α f ) B → D = α G ,where α R Proof: Do it yourself.
→ Definition 1.3: Matrix Addition & Scalar Multiplication Let A = ( ai j ) & B = ( bi j ) be mn matrices. Then C = A + B is an mn matrix with elements ci j ai j + bi j . And C = α A , with α R,is an mn matrix with elements ci j α ai j .
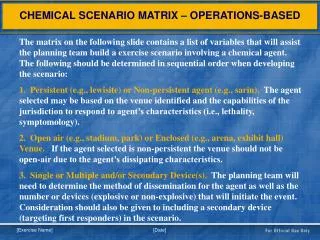
Exercise 3.IV.1. 1. The trace of a square matrix is the sum of the entries on the main diagonal (the 1,1 entry plus the 2,2 entry, etc.; we will see the significance of the trace in Chapter Five). Show that trace(H+ G) = trace(H) + trace(G). Is there a similar result for scalar multiplication?
3.IV.2. Matrix Multiplication Lemma 2.1: A composition of linear maps is linear, i.e., If h : V → W and g : W → U are linear maps, then g h : V → U is a linear map. Proof: Composition of linear maps preserves linear combinations. (see Hefferon, p.215) Definition 2.3: Matrix-Multiplicative Product The matrix-multiplicative productof the mr matrix Gand the rn matrix His the mn matrix P, where i.e.,
Theorem 2.6: A composition of linear maps is represented by the matrix product of the representatives. Proof: Let h: V n → W r and g: W r → U m be linear maps with representations where B, C, and D are bases of V, W and U, resp. Let v V with If w = h(v) W, then If x = g(w) = g h (v) U, then
→ ∴ QED Example 2.2, 4: Let h : R4 → R2 and g : R2 → R3 with bases B R4 , C R2 , D R3 so that →
Let then suggests that matrix products are associative. To be proved in Theorem 2.12 below.
Matrix dimensions: m r times r n equals m n. Example 2.7: Dimension mismatch This product is not defined
Example 2.9: Matrix multiplication need not commute. Example 2.10: Theorem 2.12: Matrix products, if defined, are associative (FG)H= F(GH) and distributive over matrix addition F(G+ H) = FG+ FHand (G+ H)F= GF+ HF. Proof: Hefferon p.219 Via component-sumation formulae or the corresponding composite maps.
Exercises 3.IV.2. 1. Represent the derivative map on Pnwith respect to B → Bwhere Bis the natural basis ( 1, x, …, xn ). Show that the product of this matrix with itself is defined. What the map does it represent? 2. ( This will be used in the Matrix Inverses exercises.) Here is another property of matrix multiplication that might be puzzling at first sight. (a) Prove that the composition of the projections πx, πy : R3 → R3 onto the x and y axes is the zero map despite that neither one is itself the zero map. (b) Prove that the composition of the derivatives d2 /dx2, d3 /dx3 : P4 →P4 is the zero map despite that neither is the zero map. (c) Give a matrix equation representing the first fact. (d) Give a matrix equation representing the second. When two things multiply to give zero despite that neither is zero, each is said to be a zero divisor.
3. The infinite-dimensional space Pof all finite-degree polynomials gives a memorable example of the non-commutativity of linear maps. Let d/dx: P → P be the usual derivative and let s: P → P be the shiftmap. Show that the two maps don’t commute: d/dx s s d/dx In fact, not only is d/dx s s d/dx not the zero map, it is the identity map.
3.IV.3. Mechanics of Matrix Multiplication (AB)i j = ( Row i of A ) ( Column j of B ) Lemma 3.7: ( Row i of A ) B = ( Row i of AB ) A ( Column j of B ) = ( Column j of AB )
Definition 3.2: UnitMatrix A matrix with all zeroes except for a one in the i, j entry is an i, j unitmatrix. • Let U be an i, j unit matrix, then • UA → Copy row j of A to row i of zero matrix of appropriate dimenions. • A U → Copy col i of A to col j of zero matrix of appropriate dimenions.
Definition 3.8: Main Diagonal The main diagonal(or principal diagonalor diagonal) of a square matrix goes from the upper left to the lower right. Definition 3.9: Identity Matrix Definition 3.12: Diagonal Matrix A diagonal matrixis square and has zeros off the main diagonal.
Definition 3.14: Permutation Matrix A permutation matrixis square and is all zeros except for a single one in each row and column. From the left (right) these matrices permute rows (columns). 3rd row to 1st 1st row to 2nd 2nd row to 3rd 1st column to 3rd 2nd column to 1st 3rd column to 2nd
Definition 3.18: Elementary Reduction Matrices The elementary reduction matricesare obtained from identity matrices with one Gaussian operation. We denote them:
The Gauss’s method and Gauss-Jordan reduction can be accomplished by a single matrix that is the product of elementary reduction matrices. Corollary 3.22: For any matrix Hthere are elementary reduction matrices R1, . . . , Rrsuch that RrRr1···R1His in reduced echelon form.
Exercises 3.IV.3 1. The need to take linear combinations of rows and columns in tables of numbers arises often in practice. For instance, this is a map of part of Vermont and New York. In part because of Lake Champlain, there are no roads directly connecting some pairs of towns. For instance, there is no way to go from Winooski to Grand Isle without going through Colchester. (Of course, many other roads and towns have been left off to simplify the graph. From top to bottom of this map is about forty miles.) Continued next page.
(a) The incidence matrix of a map is the square matrix whose i, j entry is the number of roads from city i to city j. Produce the incidence matrix of this map (take the cities in alphabetical order). (b) A matrix is symmetric if it equals its transpose. Show that an incidence matrix is symmetric. (These are all two-way streets. Vermont doesn’t have many one-way streets.) (c) What is the significance of the square of the incidence matrix? The cube? 2. The traceof a square matrix is the sum of the entries on its diagonal (its significance appears in Chapter Five). Show that trace(GH) = trace(HG). 3. A square matrix is a Markov matrixif each entry is between zero and one and the sum along each row is one. Prove that a product of Markov matrices is Markov.
3.IV.4. Inverses Example 4.1: Let π: R3 →R2 be the projection map and η : R2 →R3 be the embedding The composition π η: R2 →R2 is the identity map on R2 : π is a left inverse mapof η. η is a right inverse mapof π. The composition η π : R3 →R3 is not the identity map on R3 : π has no left inverse. η has no right inverse.
The zero map has neither left nor right inverse. Definition 4.2: Left / Right Inverse & InvertibleMatrices A matrix Gis a left inverse matrixof the matrix Hif GH = I . It is a right inverse matrixif HG = I . A matrix Hwith a two-sided inverse is an invertible matrix. That two-sided inverse is called the inverse matrixand is denoted H1. Lemma 4.3: If a matrix has both a left inverse and a right inverse then the two are equal. Proof: Statement is true on the corresponding linear maps. Theorem 4.4: A matrix is invertible if and only if it is nonsingular. Proof: Statement is true on the corresponding linear maps. Lemma 4.5: A product of invertible matrices is invertible: ( GH )1 = H 1 G 1 Proof: Statement is true on the corresponding linear maps.
Lemma 4.8: A matrix is invertible it can be written as the product of elem reduction matrices. The inverse can be computed by applying to I the same row steps, in the same order, as are used to Gauss-Jordan reduce the invertible matrix. Proof: An invertible matrix is row equivalent to I. Let R be the product of the required elementary reduction matrices so that RA = I. Then → →
Example 4.10: Example 4.11: A Non-Invertible Matrix Corollary 4.12: The inverse for a 22 matrix exists and equals if and only if ad bc 0.
Exercises 3.IV.4 1. Show that the matrix has infinitely many right inverses. Show also that it has no left inverse. 2. Show that if Tis square and if T4 is the zero matrix then Generalize. 3. Prove: if the sum of the elements of a square matrix is k, then the sum of the elements in each row of the inverse matrix is 1/k.