Download
1 / 17
170 likes | 250 Views
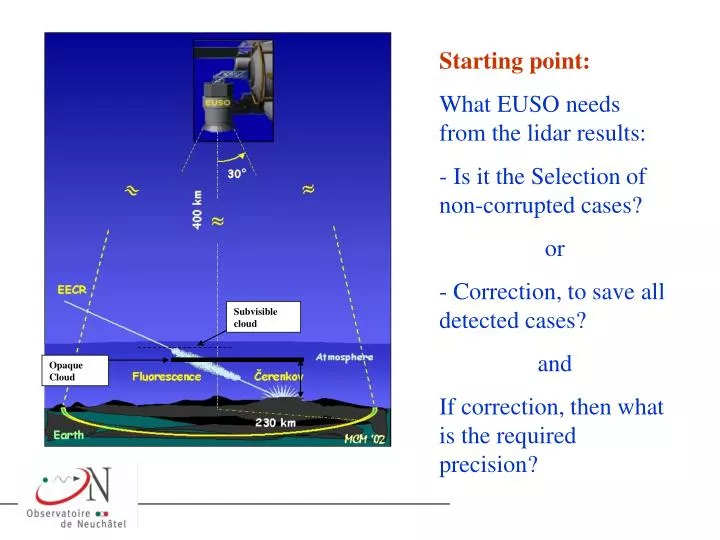
Subvisible cloud. Opaque Cloud. Starting point: What EUSO needs from the lidar results: Is it the Selection of non-corrupted cases? or Correction, to save all detected cases? and If correction, then what is the required precision?. Concepts/Options:

E N D
Subvisible cloud Opaque Cloud • Starting point: • What EUSO needs from the lidar results: • Is it the Selection of non-corrupted cases? • or • Correction, to save all detected cases? • and • If correction, then what is the required precision?
Concepts/Options: Option 1.‘Let us correct for everything’ or Maximum correction, cloud top, backscatter and attenuation - Proposal: pulsed three-wavelengths, depolarisation lidar Option 2.‘Let us live with the attenuation error’ or Correction for cloud-top only - Proposal: near-IR, diode laser based lidar Option 3. ‘Let us have the maximum but at low cost’ or to take advantage of the EUSO subsystems - Proposal: add only a laser (in UV) and use the EUSO receiver, detection and data acquisition
MAL-up MAL-down MAL instruments ready to be installed onboard the aircraft. ABLE instrument mounted in laboratory MAL-down nadir-looking MAL-up zenith-looking 32 cm ABLE nadir-looking “Geophysica” and location of the ABLE and MAL instruments. Pulsed Nd:YAG lidars, examples -1
ABLE aircraft altitude MALs Pulsed Nd:YAG lidars, examples -2
+ PRN code Lidar detected signal Atmospheric response function Diode laser based, PRN- cw lidar Why we consider such lidar? Because the diode laser provides: - compact package - long life - low consumption
Advanced Bread Board of PRN-cw lidar
EUSO lidar simulations – Pulsed, Nd-YAG, • 3rd harmonic • Performance simulations with Atmospheric features: • -Subvisible cloud • -PBL aerosol
EUSO lidar simulations – PRN-cw, laser diode, 800nm • Performance simulations with Atmospheric features: • cirrus • opaque cloud • PBL aerosol
Option 3, Advantages: - We save in lidar telescope and lidar scanner - We use a less powerful laser (questionable) Option 3, Disadvantages: - The requirements to EUSO and Lidar data acquisition do not coincide entirely. - We have to 'mix' the EUSO and lidar data acquisition with not clear implications. - Appearing of 'edge' effect leading to a limitation of the EUSO field of view.
v~8km/s EUSO x=Dt v orbit
Actions to be completed before start of Phase B: 1. Consolidated requirements for the lidar deliverables to EUSO. 2. Final performance simulations with respect to point 1. 3. Advantages-disadvantages study for Option 3. 4. Baseline design 5. Final budget evaluation, together with the industry; critical items: laser, scanner, thermal system, safety issues. 6. Design, Development and Verification plan. Approaches: End-to-End simulations in points 1, 2 ‘Shopping list' approach to points 4 and 5: To start with available space qualified laser hardware and to ‘build' the lidar around it.